请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TMS320F28069 主题中讨论的其他器件:TIDM-02000、 C2000WARE
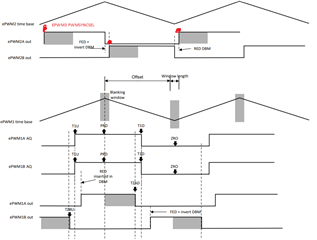
你好。 我正在尝试为 全桥转换器重新创建 TIDM-02000中描述的软件控制。 我将使用4个 PWM 进行开关。 EPWM1A/B 和 EPWM2A/B 是互补的 PWM。 我希望 EPWM1A/B 在感测到的电压达到斜升基准时对比较器做出反应。 我尝试在每个 EPWM2A/B 周期的开始使用 EPWM3来复位斜坡参考。
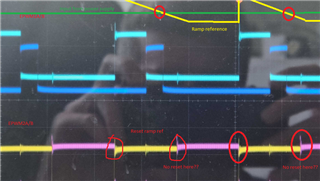
为了测试比较器是否正确关闭 EPWM1A/B、我使用比较器输入的电源来查看 EPWM1A/B 的占空比是否受到影响。 在这里、我会遇到意外行为。 我认为我重置斜坡参考的方式有问题、但我不确定。
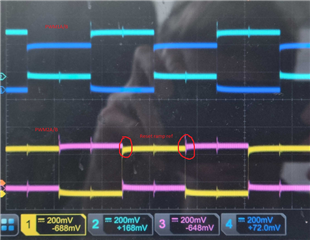
比较器没有任何电压。 运行正常
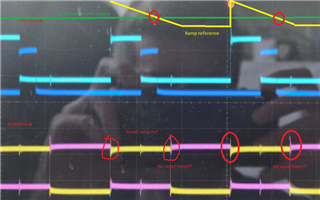
在这里、我向比较器施加一些电压。 我希望 EPWM1A/B 的行为是一样的、但它们却不是这样。 我用斜坡参考绘制了我认为正在进行的内容、但我不确定。 您能看到我做错了吗?
//###########################################################################
//
// FILE: Example_2806xEPwmDeadBand.c
//
//
// Included Files
//
#include "DSP28x_Project.h" // Device Headerfile and Examples Include File
//
// Function Prototypes
//
void InitEPwm1Example(void);
void InitEPwm2Example(void);
void InitEPwm3Example(void);
__interrupt void epwm1_isr(void);
__interrupt void epwm2_isr(void);
__interrupt void epwm3_isr(void);
//
// Globals
//
Uint32 EPwm1TimerIntCount;
Uint32 EPwm2TimerIntCount;
Uint32 EPwm3TimerIntCount;
Uint16 EPwm1_DB_Direction;
Uint16 EPwm2_DB_Direction;
Uint16 EPwm3_DB_Direction;
//
// Defines that Maximum Dead Band values
//
#define EPWM1_MAX_DB 0x0000
#define EPWM2_MAX_DB 0x0000
#define EPWM3_MAX_DB 0x0000
#define EPWM1_MIN_DB 0
#define EPWM2_MIN_DB 0
#define EPWM3_MIN_DB 0
//
// Defines to keep track of which way the Dead Band is moving
//
#define DB_UP 1
#define DB_DOWN 0
//
// Main
//
void main(void)
{
//
// Step 1. Initialize System Control:
// PLL, WatchDog, enable Peripheral Clocks
// This example function is found in the F2806x_SysCtrl.c file.
//
InitSysCtrl();
//
// Step 2. Initalize GPIO:
// This example function is found in the F2806x_Gpio.c file and
// illustrates how to set the GPIO to it's default state.
//
// InitGpio(); // Skipped for this example
//
// For this case just init GPIO pins for ePWM1, ePWM2, ePWM3
// These functions are in the F2806x_EPwm.c file
EALLOW;
SysCtrlRegs.PCLKCR0.bit.ADCENCLK = 1; // Enable Clock to the ADC
//
// Comparator shares the internal BG reference of the ADC, must be powered
// even if ADC is unused
//
AdcRegs.ADCCTL1.bit.ADCBGPWD = 1;
DELAY_US(1000); // Delay for Power Up
//
// Enable clock to the Comparator 1 block
//
SysCtrlRegs.PCLKCR3.bit.COMP1ENCLK = 1;
Comp1Regs.COMPCTL.bit.COMPDACEN = 1; // Power up Comparator 1 locally
//Comp1Regs.DACCTL.bit.DACSOURCE = 0;
Comp1Regs.DACCTL.bit.DACSOURCE = 1; // Ramp
Comp1Regs.DACCTL.bit.RAMPSOURCE = 0x2; // PWM3 sync
EPwm3Regs.HRPCTL.bit.PWMSYNCSEL = 1; // PWMSYNC is generated by TBCTR = 0 pulse. Reset Ramp reference
Comp1Regs.RAMPMAXREF_SHDW = 0xFFFF;
Comp1Regs.RAMPDECVAL_SHDW = 0x5F;
// Connect the inverting input to the internal DAC
//
Comp1Regs.COMPCTL.bit.COMPSOURCE = 0;
//Comp1Regs.DACVAL.bit.DACVAL = 512; // Set DAC output to midpoint
//
SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC = 0;
EDIS;
//
InitEPwm1Gpio();
InitEPwm2Gpio();
InitEPwm3Gpio();
EALLOW;
SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC = 1;
EDIS;
//
// Step 3. Clear all interrupts and initialize PIE vector table:
// Disable CPU interrupts
//
DINT;
//
// Initialize the PIE control registers to their default state.
// The default state is all PIE interrupts disabled and flags
// are cleared.
// This function is found in the F2806x_PieCtrl.c file.
//
InitPieCtrl();
//
// Disable CPU interrupts and clear all CPU interrupt flags
//
IER = 0x0000;
IFR = 0x0000;
//
// Initialize the PIE vector table with pointers to the shell Interrupt
// Service Routines (ISR).
// This will populate the entire table, even if the interrupt
// is not used in this example. This is useful for debug purposes.
// The shell ISR routines are found in F2806x_DefaultIsr.c.
// This function is found in F2806x_PieVect.c.
//
InitPieVectTable();
//
// Interrupts that are used in this example are re-mapped to
// ISR functions found within this file.
//
EALLOW; // This is needed to write to EALLOW protected registers
PieVectTable.EPWM1_INT = &epwm1_isr;
PieVectTable.EPWM2_INT = &epwm2_isr;
PieVectTable.EPWM3_INT = &epwm3_isr;
EDIS; // This is needed to disable write to EALLOW protected registers
//
// Step 4. Initialize all the Device Peripherals:
// This function is found in F2806x_InitPeripherals.c
//
// InitPeripherals(); // Not required for this example
EALLOW;
SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC = 0;
EDIS;
InitEPwm1Example();
InitEPwm2Example();
InitEPwm3Example();
EALLOW;
SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC = 1;
EDIS;
//
// Step 5. User specific code, enable interrupts
// Initalize counters:
//
EPwm1TimerIntCount = 0;
EPwm2TimerIntCount = 0;
EPwm3TimerIntCount = 0;
//
// Enable CPU INT3 which is connected to EPWM1-3 INT
//
IER |= M_INT3;
//
// Enable EPWM INTn in the PIE: Group 3 interrupt 1-3
//
PieCtrlRegs.PIEIER3.bit.INTx1 = 1;
PieCtrlRegs.PIEIER3.bit.INTx2 = 1;
PieCtrlRegs.PIEIER3.bit.INTx3 = 1;
//
// Enable global Interrupts and higher priority real-time debug events
//
EINT; // Enable Global interrupt INTM
ERTM; // Enable Global realtime interrupt DBGM
//
// Step 6. IDLE loop. Just sit and loop forever (optional)
//
for(;;)
{
__asm(" NOP");
}
}
//
// epwm1_isr -
//
__interrupt void
epwm1_isr(void)
{
EPwm1TimerIntCount++;
//
// Clear INT flag for this timer
//
EPwm1Regs.ETCLR.bit.INT = 1;
//
// Acknowledge this interrupt to receive more interrupts from group 3
//
PieCtrlRegs.PIEACK.all = PIEACK_GROUP3;
}
//
// epwm2_isr -
//
__interrupt void
epwm2_isr(void)
{
EPwm2TimerIntCount++;
//
// Clear INT flag for this timer
//
EPwm2Regs.ETCLR.bit.INT = 1;
//
// Acknowledge this interrupt to receive more interrupts from group 3
//
PieCtrlRegs.PIEACK.all = PIEACK_GROUP3;
}
//
// epwm3_isr -
//
__interrupt void
epwm3_isr(void)
{
EPwm3TimerIntCount++;
//
// Clear INT flag for this timer
//
EPwm3Regs.ETCLR.bit.INT = 1;
//
// Acknowledge this interrupt to receive more interrupts from group 3
//
PieCtrlRegs.PIEACK.all = PIEACK_GROUP3;
}
//
// InitEPwm1Example -
//
void
InitEPwm1Example()
{
EALLOW;
EPwm1Regs.TBPRD = 300; // Set timer period
EPwm1Regs.TBPHS.half.TBPHS = 0x0000; // Phase is 0
EPwm1Regs.TBCTR = 0x0000; // Clear counter
//
// Setup TBCLK
//
EPwm1Regs.TBCTL.bit.CTRMODE = TB_COUNT_UPDOWN; // Count up
EPwm1Regs.TBCTL.bit.PHSEN = TB_DISABLE; // Disable phase loading
EPwm1Regs.TBCTL.bit.HSPCLKDIV = 1; // Clock ratio to SYSCLKOUT
EPwm1Regs.TBCTL.bit.CLKDIV = 0;
EPwm1Regs.TBCTL.bit.SYNCOSEL = 2; // = CMPB
EPwm1Regs.CMPCTL.bit.SHDWAMODE = CC_SHADOW; // Load registers every ZERO
EPwm1Regs.CMPCTL.bit.SHDWBMODE = CC_SHADOW;
EPwm1Regs.CMPCTL.bit.LOADAMODE = CC_CTR_ZERO;
EPwm1Regs.CMPCTL.bit.LOADBMODE = CC_CTR_ZERO;
//
// Setup compare
//
EPwm1Regs.CMPA.half.CMPA = 150;
EPwm1Regs.CMPB = 150;
//
// Set actions
//
EPwm1Regs.AQCTLA.bit.CBU = AQ_SET; // Set PWM3A on CAU
EPwm1Regs.AQCTLA.bit.CBD = AQ_CLEAR; // Clear PWM3A on CAD
EPwm1Regs.AQCTLB.bit.CBU = AQ_CLEAR; // Clear PWM3B on CAU
EPwm1Regs.AQCTLB.bit.CBD = AQ_SET; // Set PWM3B on CAD
//
//
EPwm1Regs.DBCTL.bit.OUT_MODE = DB_FULL_ENABLE; // 0x3
EPwm1Regs.DBCTL.bit.POLSEL = DB_ACTV_HIC; // 0x2
EPwm1Regs.DBCTL.bit.IN_MODE = DBA_ALL; // 0x0
EPwm1Regs.DBRED = EPWM2_MAX_DB;
EPwm1Regs.DBFED = EPWM2_MAX_DB;
EPwm1_DB_Direction = DB_UP;
//
//
EPwm1Regs.ETSEL.bit.INTSEL = ET_CTR_ZERO; // Select INT on Zero event
//EPwm2Regs.ETSEL.bit.INTEN = 1; // Enable INT
EPwm1Regs.ETPS.bit.INTPRD = ET_3RD; // Generate INT on 3rd event
//--- Setup for forcing EPWM1A/B low when input voltage reaches ramp reference
EPwm1Regs.DCTRIPSEL.bit.DCAHCOMPSEL = DC_COMP1OUT; // DCAH = Comparator 1 output
EPwm1Regs.DCTRIPSEL.bit.DCBHCOMPSEL = DC_COMP1OUT;
EPwm1Regs.TZDCSEL.bit.DCAEVT2 = TZ_DCAH_HI; // DCAEVT2 = DCAH high(will become active
EPwm1Regs.TZDCSEL.bit.DCBEVT2 = TZ_DCBH_HI;
EPwm1Regs.DCACTL.bit.EVT2SRCSEL = DC_EVT2; // DCAEVT2 = DCAEVT2 (not filtered)
EPwm1Regs.DCACTL.bit.EVT2FRCSYNCSEL = DC_EVT_ASYNC; // Take async path // Enable DCAEVT2 as a
EPwm1Regs.DCBCTL.bit.EVT2SRCSEL = DC_EVT2; // DCAEVT2 = DCAEVT2 (not filtered)
EPwm1Regs.DCBCTL.bit.EVT2FRCSYNCSEL = DC_EVT_ASYNC; // Take async path // Enable DCAEVT2 as a
// one-shot trip source
// Note: DCxEVT1 events can be defined as
// one-shot.
// DCxEVT2 events can be defined as
// cycle-by-cycle.
EPwm1Regs.TZSEL.bit.DCAEVT2 = 1;
EPwm1Regs.TZSEL.bit.DCBEVT2 = 1; // What do we want the DCAEVT1 and DCBEVT1
// events to do?
// DCAEVTx events can force EPWMxA
// DCBEVTx events can force EPWMxB
EPwm1Regs.TZCTL.bit.TZA = TZ_FORCE_LO; // EPWM1A will go low
EPwm1Regs.TZCTL.bit.TZB = TZ_FORCE_LO; // EPWM1B will go low
EDIS;
}
//
// InitEPwm2Example -
//
void
InitEPwm2Example()
{
EPwm2Regs.TBPRD = 300; // Set timer period
EPwm2Regs.TBPHS.half.TBPHS = 0x0000; // Phase is 0
EPwm2Regs.TBCTR = 0x0000; // Clear counter
//
// Setup TBCLK
//
EPwm2Regs.TBCTL.bit.CTRMODE = TB_COUNT_UPDOWN; // Count up
EPwm2Regs.TBCTL.bit.PHSEN = TB_DISABLE; // Disable phase loading
EPwm2Regs.TBCTL.bit.HSPCLKDIV = 1; // Clock ratio to SYSCLKOUT
EPwm2Regs.TBCTL.bit.SYNCOSEL = 1; // Time-base counter equal to zero (TBCTR = 0x0000). In order to sync EPWM3
//
// Slow so we can observe on the scope
//
EPwm2Regs.TBCTL.bit.CLKDIV = 0;
//
// Setup compare
//
EPwm2Regs.CMPA.half.CMPA = 150;
//
// Set actions
//
EPwm2Regs.AQCTLA.bit.ZRO = AQ_SET; // Set PWM1A on CAU
EPwm2Regs.AQCTLA.bit.PRD = AQ_CLEAR; // Clear PWM1A on CAD
EPwm2Regs.AQCTLB.bit.ZRO = AQ_CLEAR; // Clear PWM1B on CAU
EPwm2Regs.AQCTLB.bit.PRD = AQ_SET; // Set PWM1B on CAD
//
// Active high complementary PWMs - Setup the deadband
//
EPwm2Regs.DBCTL.bit.OUT_MODE = DB_FULL_ENABLE; // 0x3
EPwm2Regs.DBCTL.bit.POLSEL = DB_ACTV_HIC; // 0x2
EPwm2Regs.DBCTL.bit.IN_MODE = DBA_ALL; // 0x0
EPwm2Regs.DBRED = EPWM2_MAX_DB;
EPwm2Regs.DBFED = EPWM2_MAX_DB;
EPwm2_DB_Direction = DB_UP;
//
//
//
EPwm2Regs.ETSEL.bit.INTSEL = ET_CTR_ZERO; // Select INT on Zero event
//EPwm2Regs.ETSEL.bit.INTEN = 1; // Enable INT
EPwm2Regs.ETPS.bit.INTPRD = ET_3RD; // Generate INT on 3rd event
}
//
// InitEPwm3Example -
//
void
InitEPwm3Example()
{
EPwm3Regs.TBPRD = 300; // Set timer period
EPwm3Regs.TBPHS.half.TBPHS = 0; // Phase is 0
EPwm3Regs.TBCTR = 0; // Clear counter
//
// Setup TBCLK
//
EPwm3Regs.TBCTL.bit.CTRMODE = TB_COUNT_DOWN; // Count down
EPwm3Regs.TBCTL.bit.PHSEN = 1; // Enable phase loading
EPwm3Regs.TBCTL.bit.HSPCLKDIV = 1; // Clock ratio to SYSCLKOUT
//
EPwm3Regs.TBCTL.bit.CLKDIV = 0;
//
// Setup compare
//
EPwm3Regs.CMPB = 150;
//
// Set actions
//
EPwm3Regs.AQCTLA.bit.ZRO = AQ_SET; // Set PWM3A on CAU
EPwm3Regs.AQCTLA.bit.CBD = AQ_CLEAR; // Clear PWM3A on CAD
EPwm3Regs.AQCTLB.bit.ZRO = AQ_CLEAR; // Clear PWM3B on CAU
EPwm3Regs.AQCTLB.bit.CBD = AQ_SET; // Set PWM3B on CAD
//
//
//
//
EPwm3Regs.ETSEL.bit.INTSEL = ET_CTR_ZERO; // Select INT on Zero event
//EPwm2Regs.ETSEL.bit.INTEN = 1; // Enable INT
EPwm3Regs.ETPS.bit.INTPRD = ET_3RD; // Generate INT on 3rd event
}
//
// End of File
//