Other Parts Discussed in Thread: TMS320F28062F, C2000WARE-MOTORCONTROL-SDK
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TMS320F28062F 主题中讨论的其他器件: C2000WARE-MOTORCONTROL-SDK
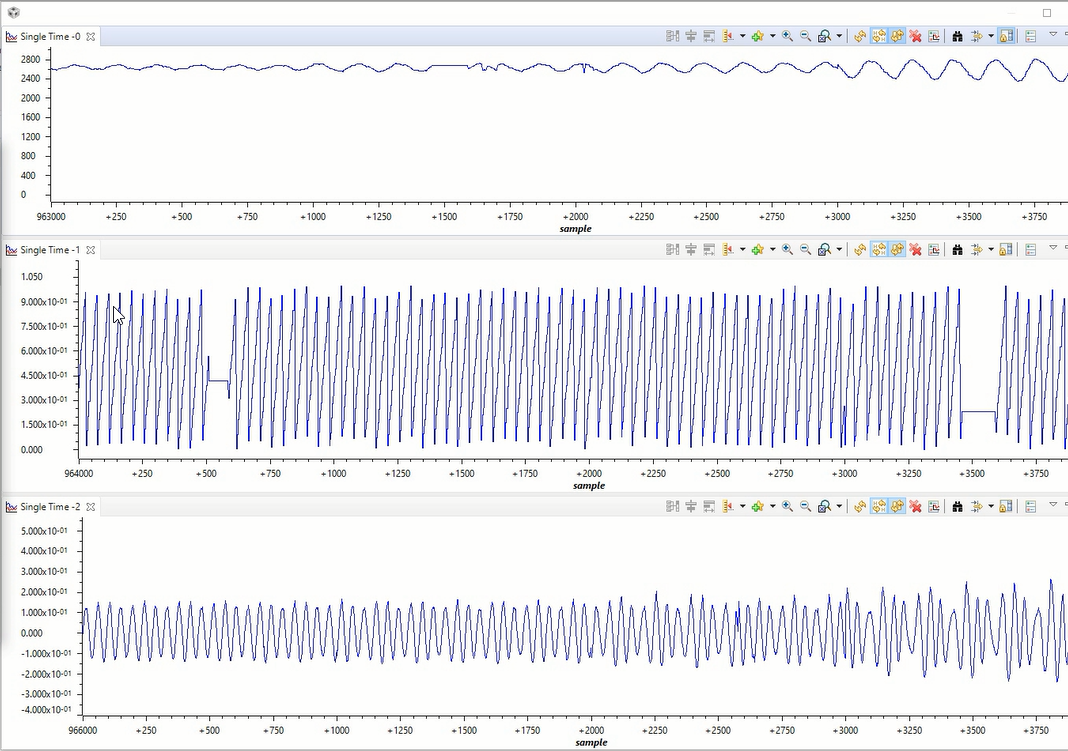
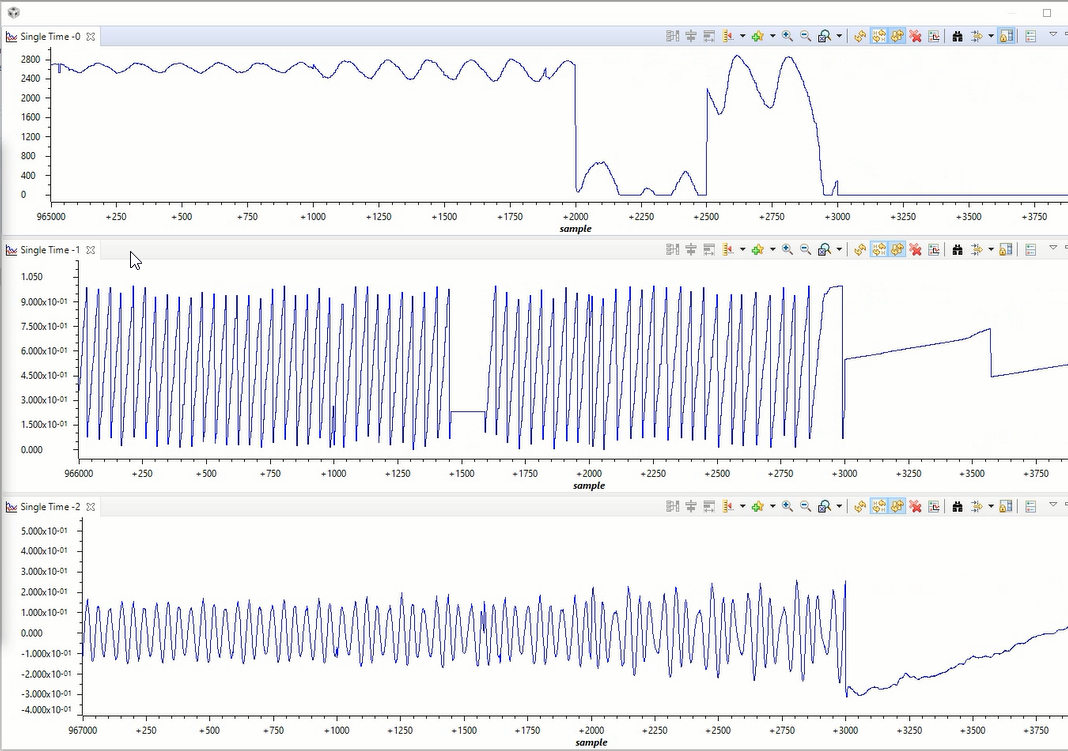
我正在开发使用 TMS320F28062F 的3.7kW 额定功率 VFD 的机密定制硬件。 应用是使用提供的 Instaspin 实验室开发的、该实验室能够正常运行 SPMSM 电机、我遇到了 IPMSM 类型电机的问题、在此类电机的振动频率下、电机经常振动。 请告诉我是否需要任何进一步的具体信息。 请建议解决方案。
Samir