

主题中讨论的其他器件:BOOSTXL-DRV8305EVM、 CSD88599Q5DC、 CSD88584Q5DC、 MOTORWARE
有2种几乎相同的设计、一种设计完美无瑕、另一种设计不完美。 工作板的原理图如下所示:

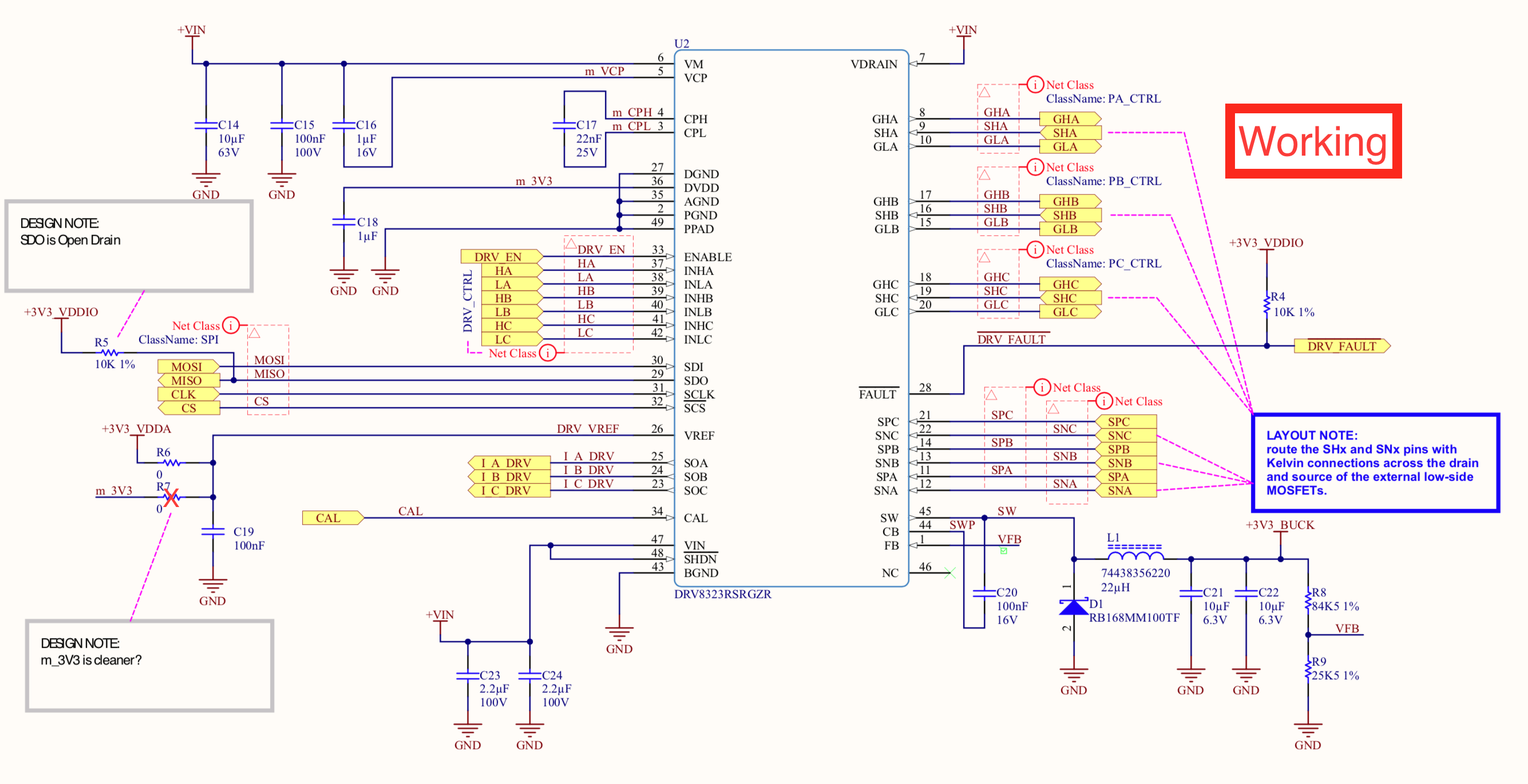
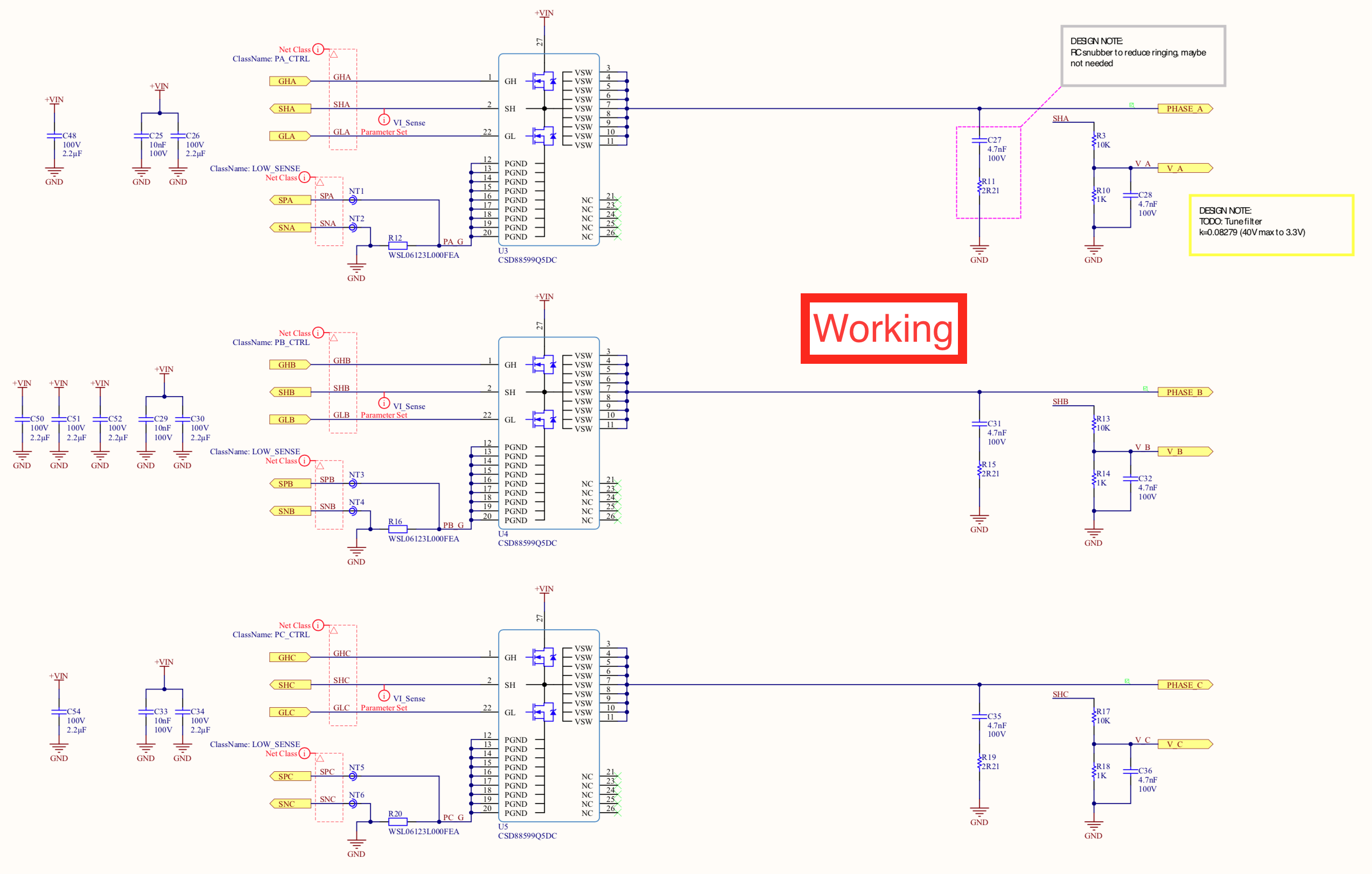
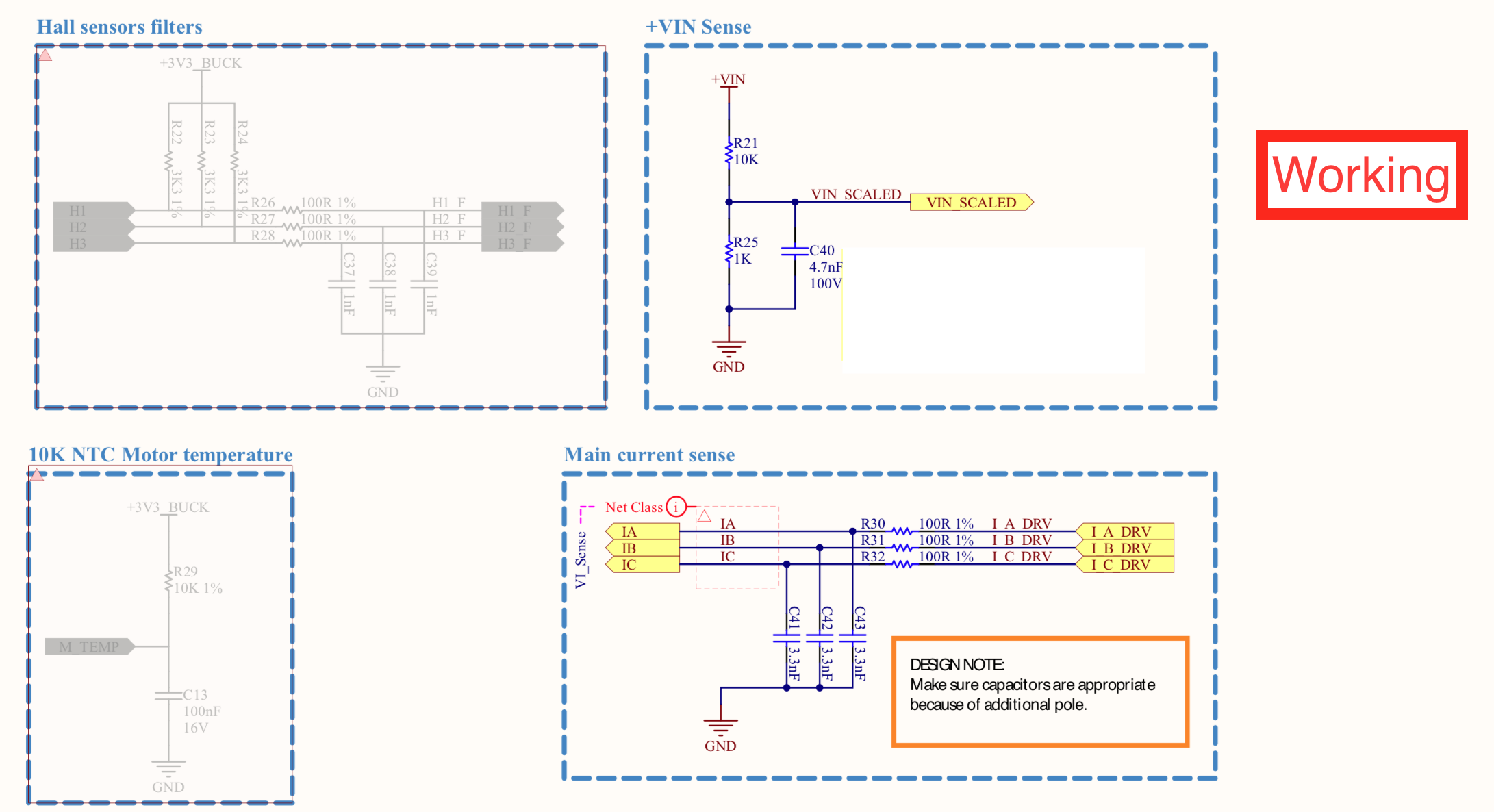
与 BOOSTXL-DRV8305EVM -电流反馈滤波器(我们的100R+3.3nF 与56R+2.2nF)相比、分压器比率不同、电压滤波器截止频率错误。 尽管如此、它仍然运行良好、即使在100RPM 电机平稳旋转且具有大量可用扭矩的情况下也是如此。 使用的 user.h 参数(在升压板上学习):
#define USER_IQ_FULL_SCALE_VOLTAGE_V (24) #define USER_ADC_FULL_SCALE_VOLTGE_V (33) #define USER_IQ_FULL_SCALE_CURRENT_A (41.25) #define USER_ADC_FULL_SCALE_CURRENT_A (55) #define I_A_offset (0.287211) #define I_B_offset (0.286317) #define I_C_offset (0.284386) #define V_A_offset (0.045690) #define V_B_offset (0.045514) #define V_C_offset (0.044920) #define USER_SYSTEM_FREQMHz (60.0) #define USER_PWM_FREQ_kHz (45.0) #define USER_R_OVER L_EST_FREQ_Hz (300) #define USER_VOLTGE_FILTER_POLE_Hz (335.648) #define USER_MOTOR_TYPE Motor_Type_Pm #define USER_MOTOR_NUM_POLE_PAIRS (7) #define USER_MOTOR_RR (空) #define USER_MOTOR_Rs (0.0187090952) #define USER_MOTOR_LS_d (0.0000114935112) #define USER_MOTOR_LS_q (0.0000114935112) #define USER_MOTOR_RATed_FLUX (0.01622281) #define USER_MOTOR_磁 化电流(NULL) #define USER_MOTOR_RES_EST_CURRENT (6.0) #define USER_MOTOR_IND_EST_CURRENT (-6.0) #define USER_MOTOR_MAX_CURRENT (15.0) #define USER_MOTOR_FLUX_EST_FREQ_Hz (50)
在该电路板上了解到的 user.h 参数:
#define USER_IQ_FULL_SCALE_VOLTAGE_V (24) #define USER_ADC_FULL_SCALE_VOLTAGE_V (33.0) #define USER_IQ_FULL_SCALE_CURRENT_A (41.25) #define USER_ADC_FULL_SCALE_CURRENT_A (27.5) #define I_A_OFFSET (0.287211) #define I_B_OFFSET (0.286317) #define I_C_OFFSET (0.284386) #define V_A_OFFSET (0.045690) #define V_B_OFFSET (0.045514_FREQ_SYSTEM )#define 0.044MHz (60.0) #define USER_PWM_FREQ_kHz (45.0) #define USER_R_over_L_EST_FREQ_Hz (300) #define USER_VOLTAGE_FILTER_POLE_Hz (335.648) #define USER_MOTOR_TYPE Motor_Type_Pm #define USER_MOTOR_NUM_POLE_PAIRS (7) #define USER_MOTOR_RR (空) #define USER_MOTOR_Rs (0.035178) #define USER_MOTOR_LS_d (0.000020464) #define USER_MOTOR_LS_q (0.000020464) #define USER_MOTOR_RATed_FLUX (0.010968) #define USER_MOTOR_磁 化电流(NULL) #define USER_MOTOR_RES_EST_CURRENT (6.0) #define USER_MOTOR_IND_EST_CURRENT (-6.0) #define USER_MOTOR_MAX_CURRENT (15.0) #define USER_MOTOR_FLUX_EST_FREQ_Hz (50)
请注意不同的 USER_ADC_FULL_SCALE_CURRENT_A 值、但无论哪种电机旋转方式都很好、只有 id 在55A (约10mR)下给出错误结果。
不确定 USER_ADC_FULL_SCALE_CURRENT_A 是否为正-负电流应在此处(27.5 --27.5 = 55A)或仅为正(27.5A)。
下面不工作:
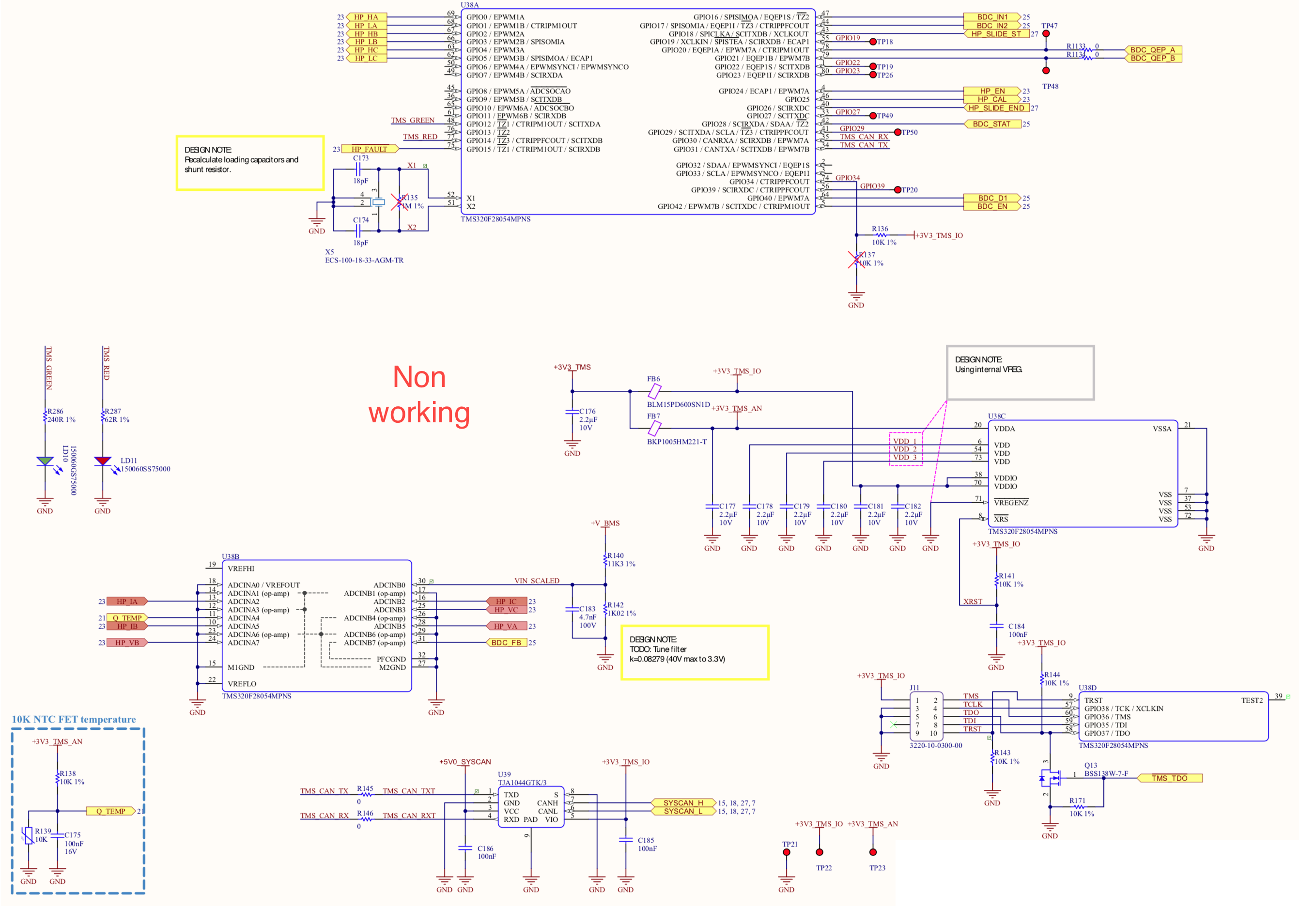
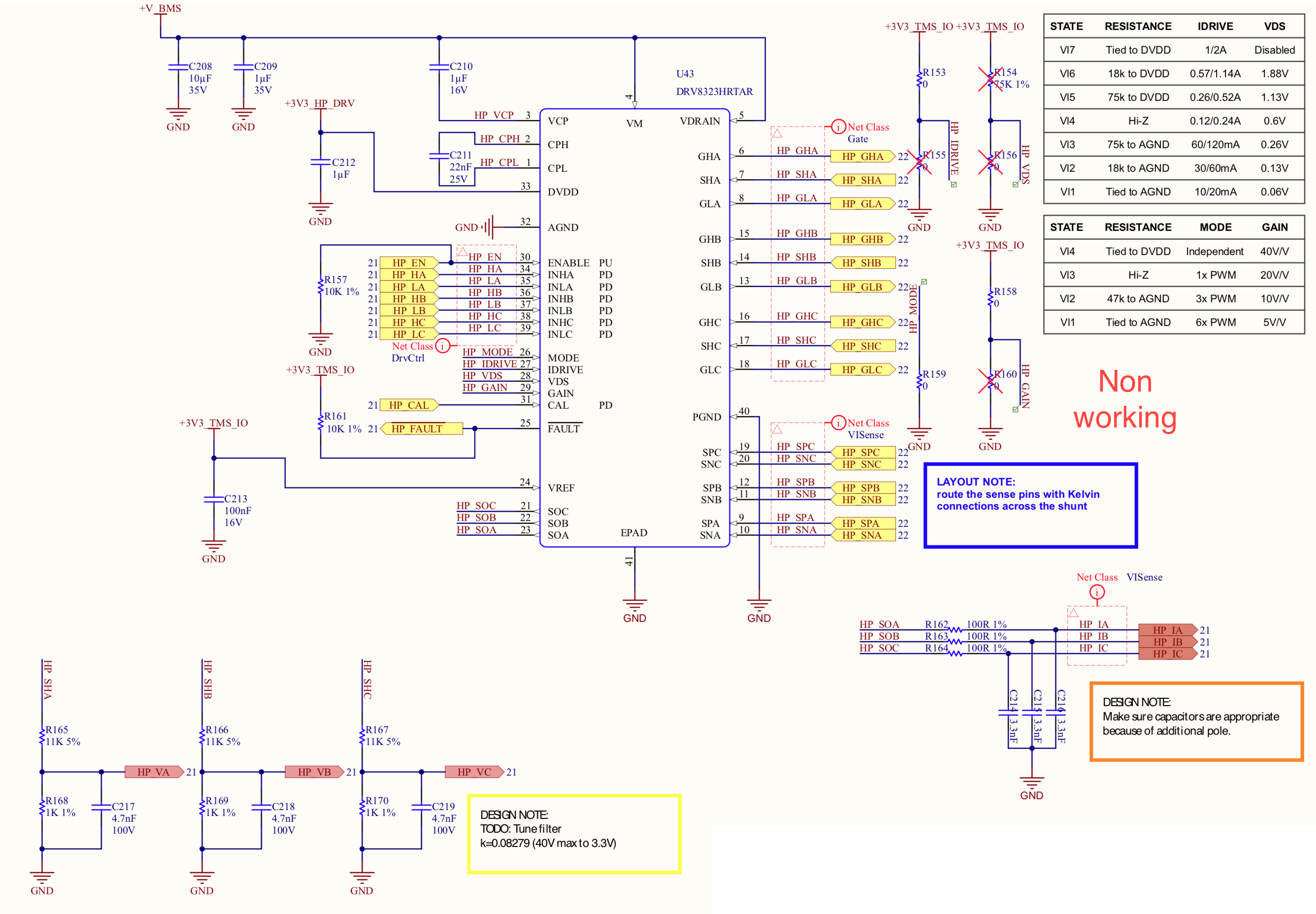

我们知道的差异:
1) CSD88584Q5DC (40V 版本)与 CSD88599Q5DC (60V 版本)之间的关系、如果这是个问题、将会非常令人惊讶。
2) DRV8323H (默认情况下使用与 RS 版本相同的设置)与 DRV8323RS (默认设置)之间的关系、不能考虑其重要性的任何原因。
3)另一个分压比
4)原理图显示40V/V 增益、我们尝试了40和20。
我们所做的:
1) 1)将分压器更改为36K + 5K1 = 26.6V 满量程、使用较高的满量程分压器、学习完成时没有错误、但 Rs (约10mR)、(0.008V/Hz)区域中的磁通和 Ls (约0.16mH)的结果错误。 现在、使用新的分频器学习从嗡嗡声开始、给出大约50mR、然后缓慢开始旋转电机。 当状态机从旋转向上移动到 LS 测量电机突然停止并开始再次旋转时。 该停止具有不同的值、非常软或硬点击。 之后、它会旋转一段时间、id 以错误结束。
2) 2)已将电压滤波器截止频率更改为356Hz、但没有任何变化、即使这看起来很重要。
3) 3)将电源几乎直接连接到 FET、在该板上有一个更大的接地平面和电源平面、因此电流会低于 DRV、可能会导致一些问题、但没有任何变化。
4) 4)将 USER_IQ_FULL_SCALE_VOLTAGE_V 更改为 许多不同的值、除了具有某些组合的非启动代码外、没有任何明显的变化。
5) 5)将 USER_IQ_FULL_SCALE_CURRENT_A 反向和值、因为我们不确定哪个值是正确的。
6)尝试了许多 USER_MOTOR_RES_EST_CURRENT、包括2A (约为标称电流的10%、id 无法旋转电机)、6A (大部分时间都使用)、9A、12A
7) 7)尝试不同 的 USER_MOTOR_IND_EST_CURRENT 电流-1、-1.5、-2、-6A
8) 8)尝试了不同 的 USER_MOTOR_FLUX_EST_FREQ_Hz、20、30、40、50、 100Hz。 20是最差的、电机旋转了一段时间、然后产生可怕的噪声、其他的结果大致相同。
9)尝试了不同 的 USER_R_OVER L_EST_FREQ_Hz (100、200、300Hz)、没有发现任何改进。
10) 10)尝试了不同的电机、所有电机上的行为都相同。
11)已尝试不同的总线电压(12、18、24V)、在所有电压上的行为都相同。
12)尝试仅使用陶瓷电容器并添加180uF 电解电容器(与工作板上相同)、未注意到任何变化。
13)放置其他板上的电机参数并旋转电机(在缓慢转速时始终存在相同的问题、有时也会出现更高的问题)。
14)使用具有短导线的锂离子电池与实验室电源和较长导线的电池(工作板无关、在这里没有明显变化)。
15)验证 ADC 是否提供了正确的值(禁用了所有 FET、对每个相位施加了外部电压;仅启用了低侧 FET、通过电子负载施加了4A;在这两种情况下、均可在合理的情况下设置值)。

