请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TMS320F28069M 主题中讨论的其他器件:TMDSHVMTRINSPIN、 MOTORWARE
大家好、
以下是客户可能需要您帮助的一些问题:
在 使用 TMDSHVMTRINSPIN 套件进行 lab5c 实验期间、控制卡上的 LD1保持闪烁。

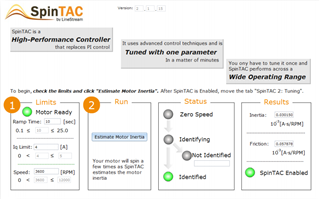
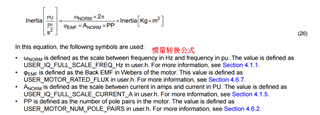
2. 此系统可识别的最大电机惯性是多少? 客户的目标是0.893Kg*m^2,这是可以实现的吗?
谢谢、此致
耶鲁李