Other Parts Discussed in Thread: TMS320F28027F, DRV8301
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TMS320F28027F 主题中讨论的其他器件: DRV8301
我们正在使用 Insta Spin TMS320F28027F 处理器构建一个无传感器电机 FOC 控制器、用于液压泵、95%运转正常、 但在高负载下、电机电流大于100A 时、有时会发生故障、并在满电流输出图1和2下将速度从3300降至大约300rpm。 30Hz 的频率在控制器带宽范围内、并且可能与相位裕度有关。
如果空载电机在大于25 krpmps 的高加速设置下加速、我们可以对这种情况进行仿真、即高电机电流。
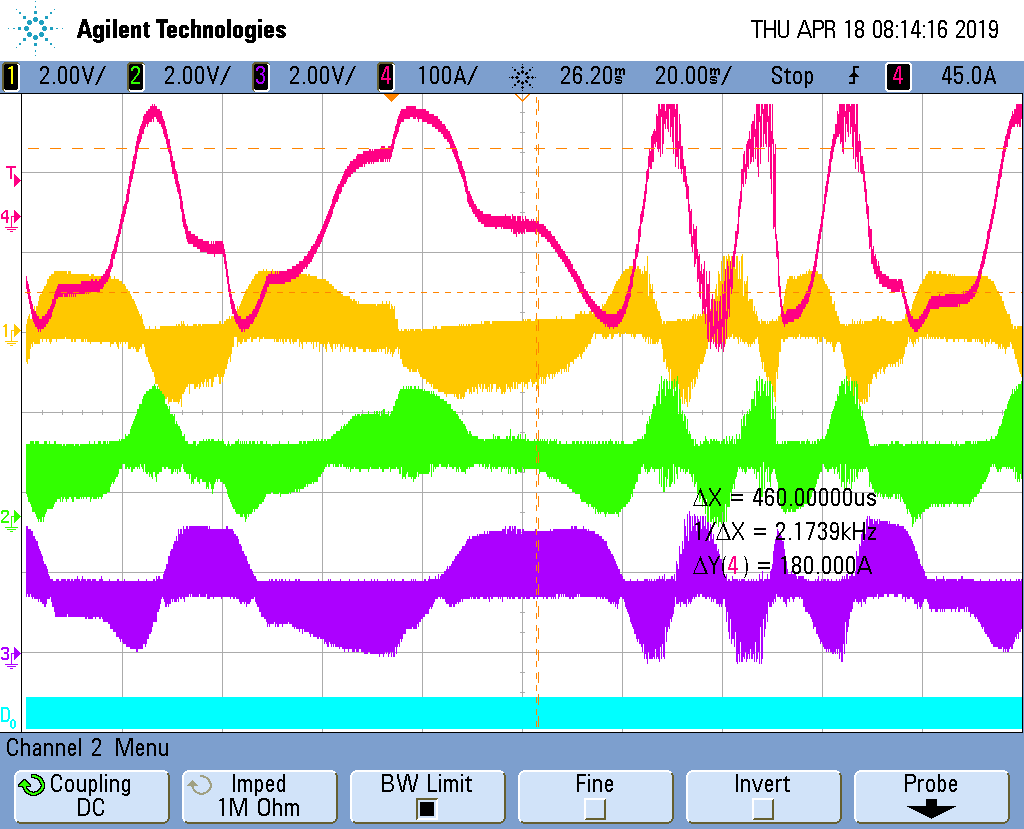
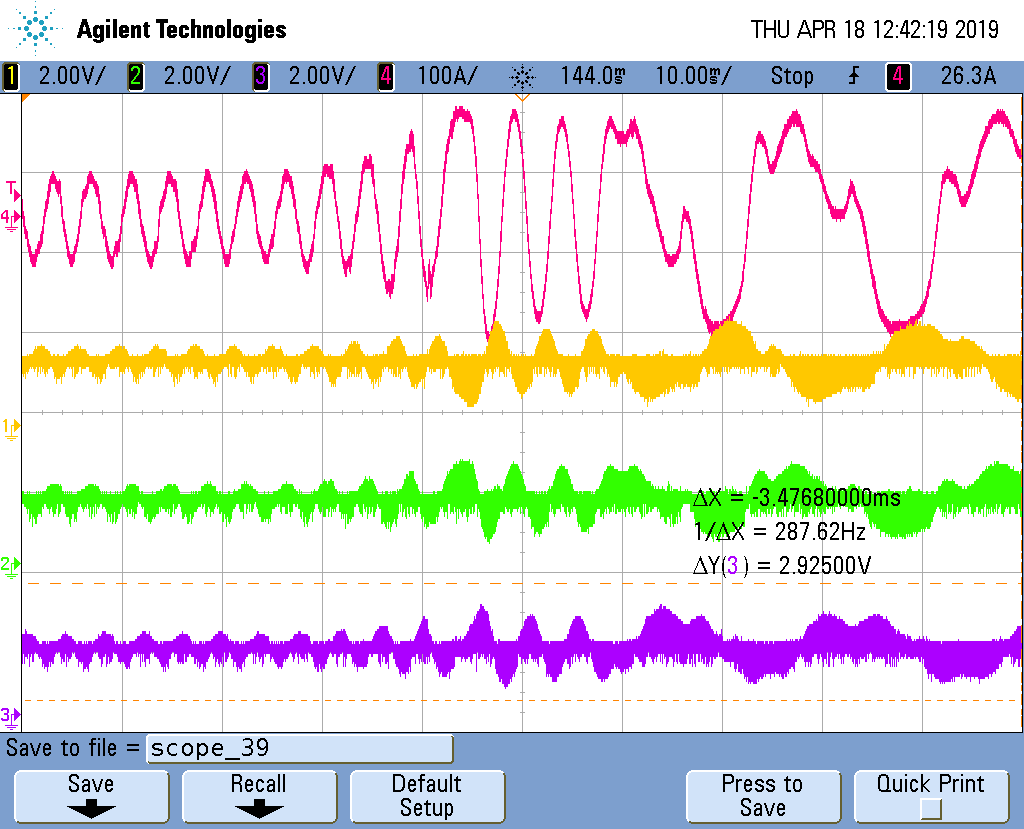
我们还会在输出电流上遇到频率约为2000Hz 的振荡。(图 3) 3)可以通过降低 KP_SPD 来减少高负载时的这种振荡、但该值现在非常低、以至于在速度和/或负载阶跃上会发生高达30%的大过冲。
如果我们对控制器进行仿真、则该过冲与实际情况相当、但在仿真中、系统会在控制器和电机参数发生较大变化时保持稳定。
电机24V Imax = 160A LS = 40uH Rs = 0.006 Ω PWM 频率= 20KHz 电流控制器= 10KHz 速度控制器1KHz (也试过2KHz 和5KHz、看起来需要一些改进)。
在正常负载下,系统工作正常,只有速度过冲有点高。
我们使用 DRV8301评估板开始开发、但由于大电流、我们现在使用自己的硬件。
有没有关于如何解决此问题的建议?
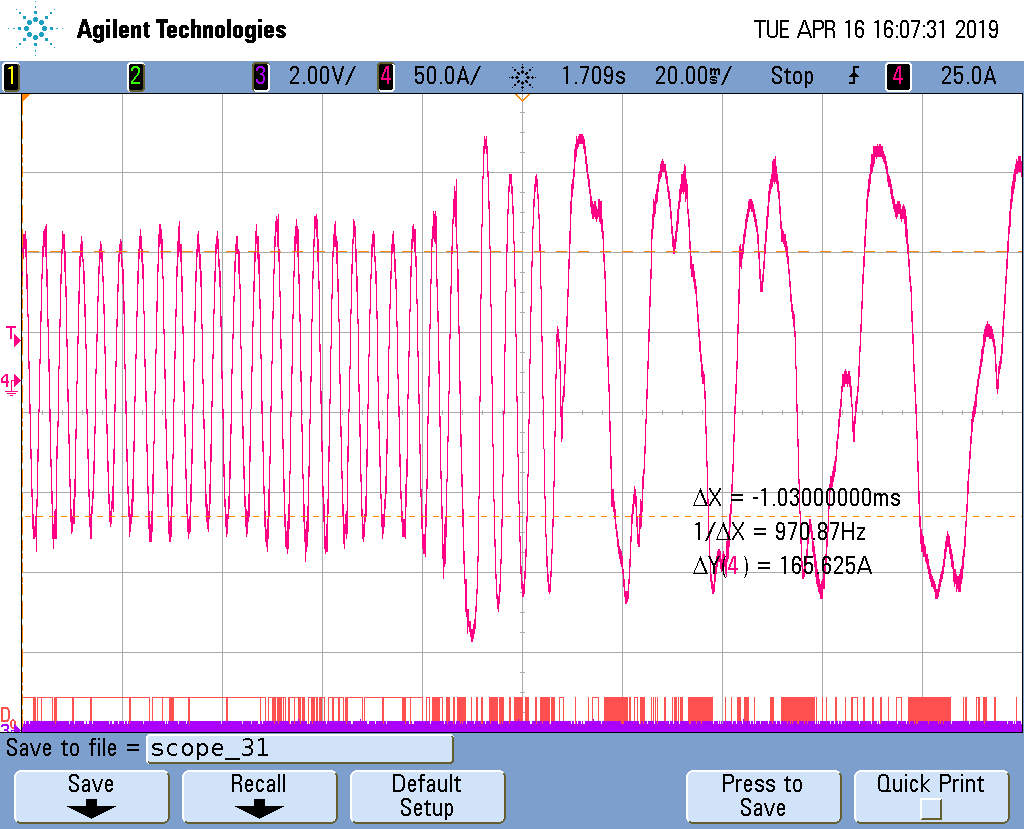
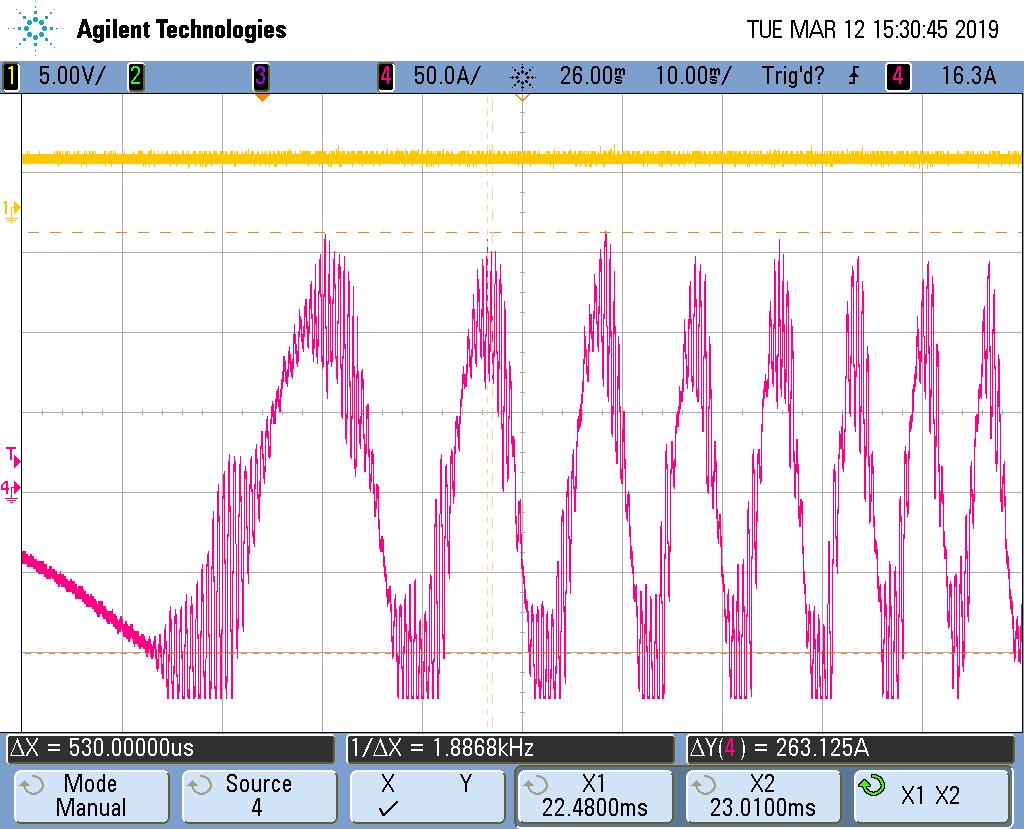
图 1增加负载、直到控制器失去锁相
图 2详细说明了锁定电流高达150A 但低速约为300rpm 时的情况、因此速度控制器在最大电机电流时饱和。 在电流发生错误之前、可以看到大约30Hz 的电流调制。
图 重负载时输出电流出现3次振荡、并非总是预发送