请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:INSTASPIN-BLDC 主题中讨论的其他器件:TIDA-00916、 MOTORWARE
工具/软件:Code Composer Studio
您好!
我对电压检测电路中的滤波器频率设置感到困惑。
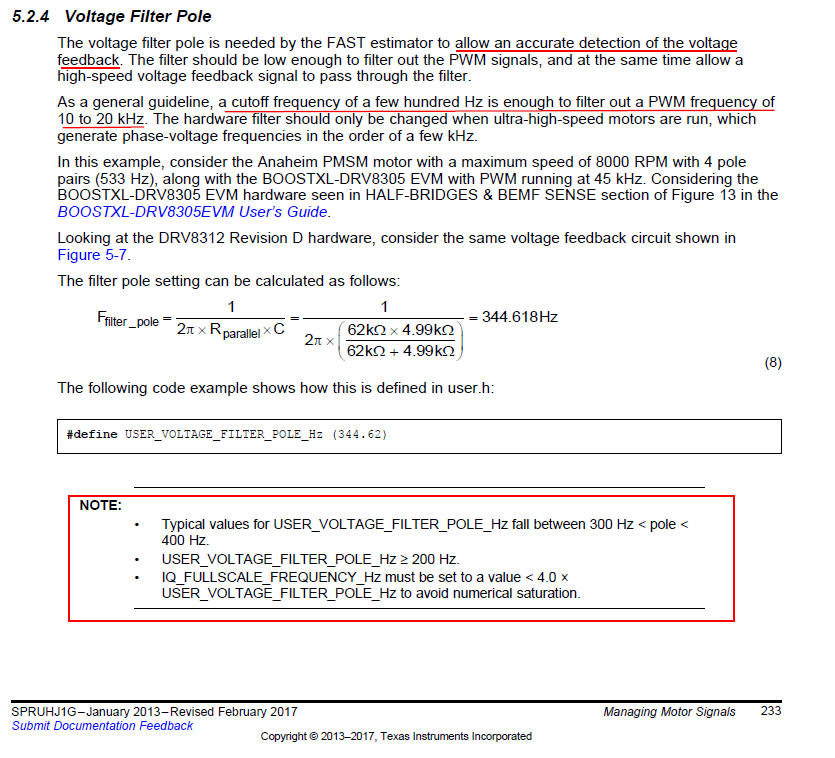
InstaSpin-focus_VOLTGE_FILTER_POLE_Hz 的典型值介于300Hz <极点<400Hz 和本示例中的最大电频率为533Hz 之间。 您可以参考下图。
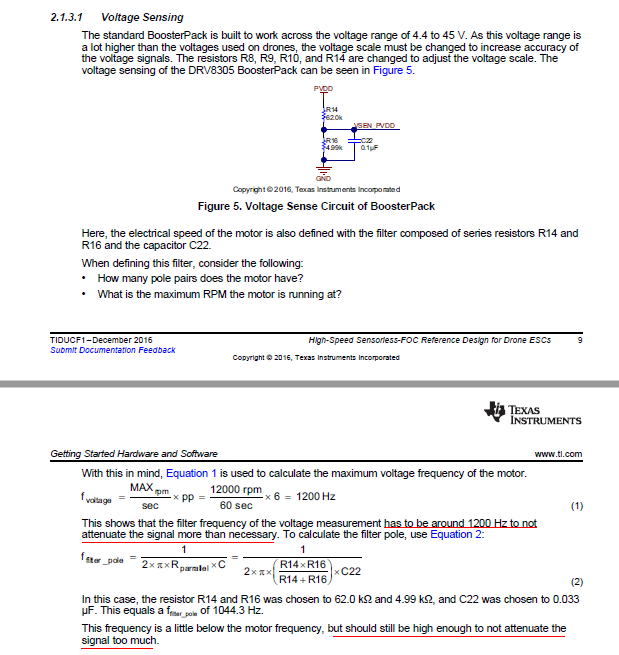
在 TIDA-00916的数据表中、频率应略低于电机电频率、但仍应足够高、不会使信号衰减太多(第10页)。
我对这两个解释感到非常困惑, 我认为 这是矛盾的。 我的观点是第二个解释和 相应的设置方法可能 更合理。所以、如果我的系统的最大频率为1500 Hz、滤波器频率应设置为1500 Hz 左右。 此外、我想知道如果频率设置得太低、滤波器频率将如何影响我的系统。
谢谢。