Other Parts Discussed in Thread: CONTROLSUITE
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TMS320F28035 Thread 中讨论的其他器件:DRV8312-C2-KIT、controlSUITE
客户能够借助 DRV8312-C2-KIT 以高速旋转传感器电机。 这是一个低电感、霍尔传感器电机。 我们能够修改代码以加快 PWM 速度、并在霍尔传感器模式下增加 GUI 的速度控制。 但我们需要优化方面的帮助。
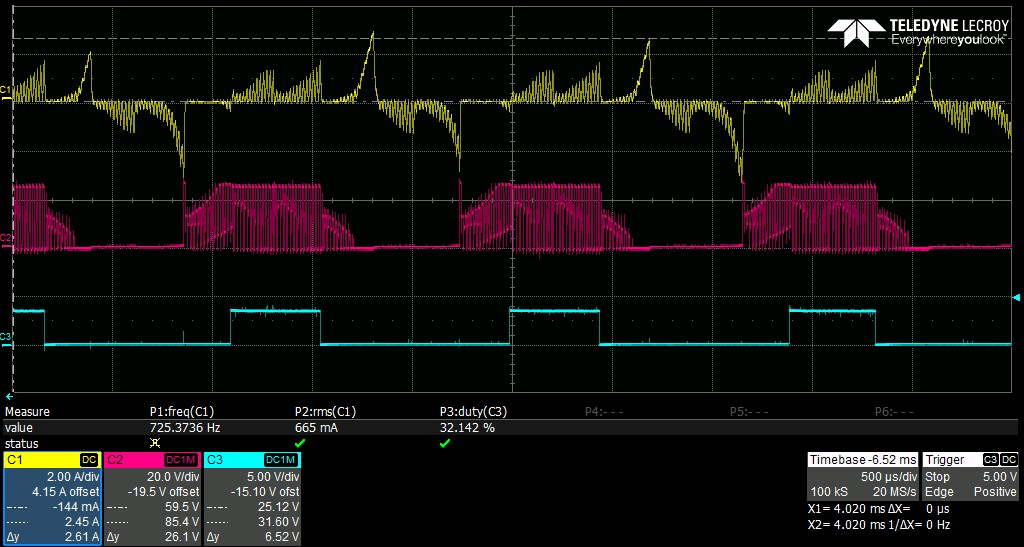
这是旋转时的电机波形示波器截图。 顶部是相电流、中间是电压、底部是 MCU 输出的 PWM_A。 电流尖峰较大、电压波形看起来换向有点晚。 你同意吗? 如果是、如何在代码中调整计时?