

请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TMS320F28377S-Q1 Thread 中讨论的其他器件:controlSUITE、 C2000WARE
大家好、
你好。 我代表客户发布此查询。
"我正在使用状态控制 FOC 进行步进电机控制。 现在、我想提取并记录电机运行时的状态参数。 控制环路运行20微秒、我需要一个程序来每1或2微秒获取一组完整的参数。
现在我使用图形工具、但 采样率太低。
电机位置由增量编码报告、C2000中的 QEP 模式计算转子位置、然后根据电机公式计算电坐标中的转子位置。 代码如下所示
StepsValue 通过 EQep1Regs.QPOSCNT 获取。然后通过常数(conv_rate)转换为微步进、
StepsValue =(int32)(****(float32) conv_rate);
由于每转一圈需要1600微步进、因此转子物理角度的计算方法如下
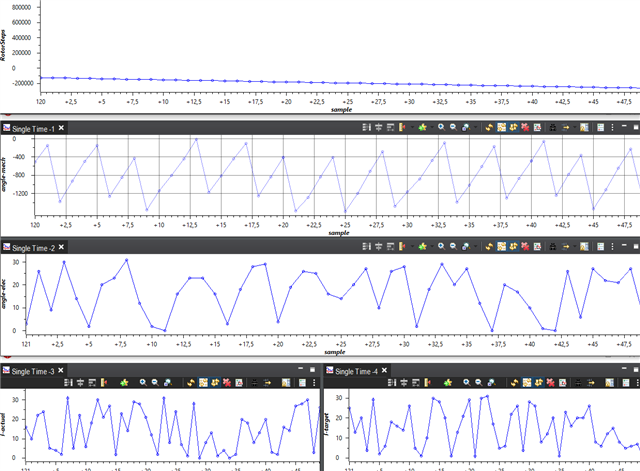
angle_mech =(Int16)(StepsValue % 1600);
因此、angle_mech 的波形应该是锯齿波形、但图形显示的是相反的波形。 采样率太低。
和转子电角的计算方法如下
angle_elec = angle_mech & 0x001F;
波形也应该是锯齿波、但标量应该在0-31中。
电机逆时针运行、如图1所示。 图2按顺时针方向显示。
只有 StepsValue 是对的、但 角机械的方向是反向的、其他的则是混乱的"

请提供建议。 感谢您的帮助。
此致、
Marvin
