Other Parts Discussed in Thread: SN65HVD257EVM, TMS320F28379D, C2000WARE
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TMS320F28379D 主题中讨论的其他器件:SN65HVD257EVM、 C2000WARE
工具/软件:Code Composer Studio
尊敬的所有人:
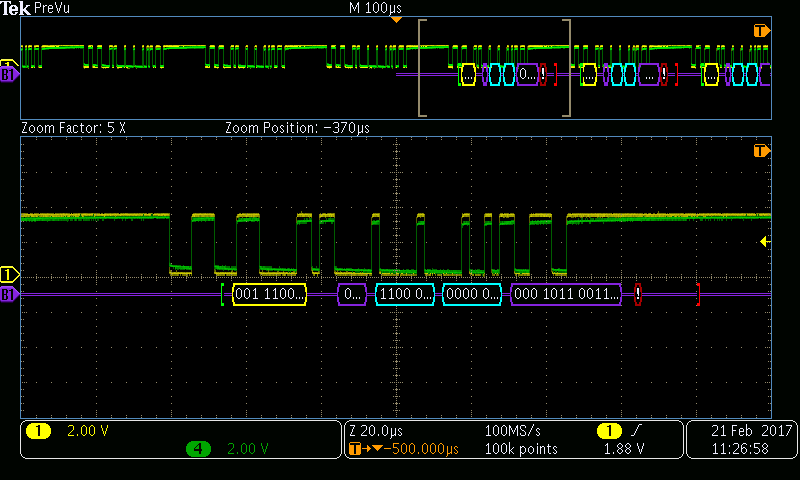
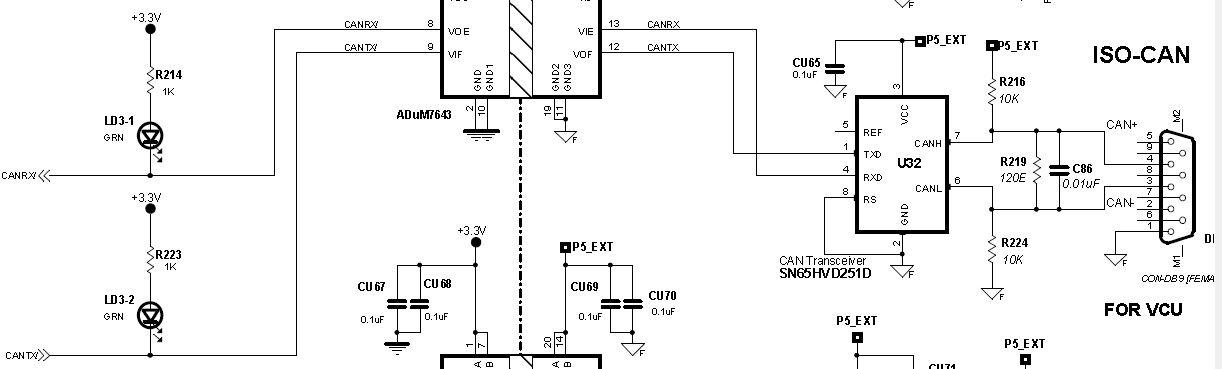
我在 进行 CAN 协议测试时遇到两个 F28379X 控制卡之间的互连问题。 我已经 通过 CAN 接口点( 即 VH 和 VL 引脚)的 DB9连接器连接了两个 MCU 板。 我在两个 MCU 中都转储了"CAN 环回"的源代码。 那么、有人能告诉我检查输出以测试 CAN 通信的过程吗?
提前感谢。
Sumanta