请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TMS320F28379S 主题中讨论的其他器件:C2000WARE
C2000变角、请在下面查找我的客户的消息、并提供一个接近其所需规格的示例。
我使用的是 F28377S 微控制器、
我对 i2cn´t 有一些疑问、因为我无法正确配置(用于发送要显示的数据的配置)。
我需要:
- 微控制器必须是主器件。
- 微控制器必须发送数据/Start–数据(带有从器件地址)–Stop / Bytes 到从器件。
- I2C 数据必须在函数调用时发送(无中断)。
在 C2000或控制套件提供的示例中、不考虑这种情况(中断示例)。
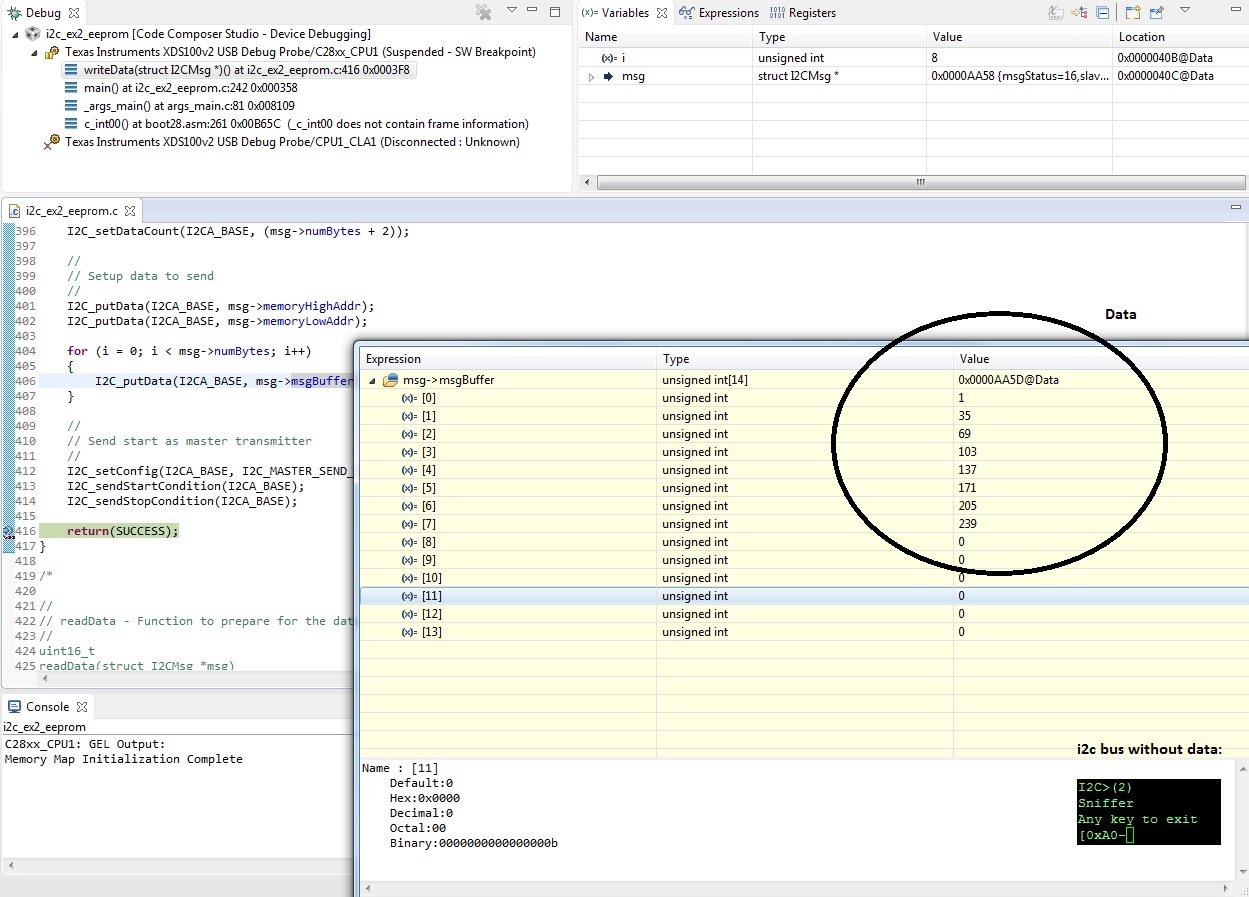
在我的示例中,微控制器仅将从地址发送到 i2c 总线(不含数据),我不知道原因。
我尝试了许多 i2c 配置、但结果是相同的。