请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TMS320F28377S 主题中讨论的其他器件: C2000WARE
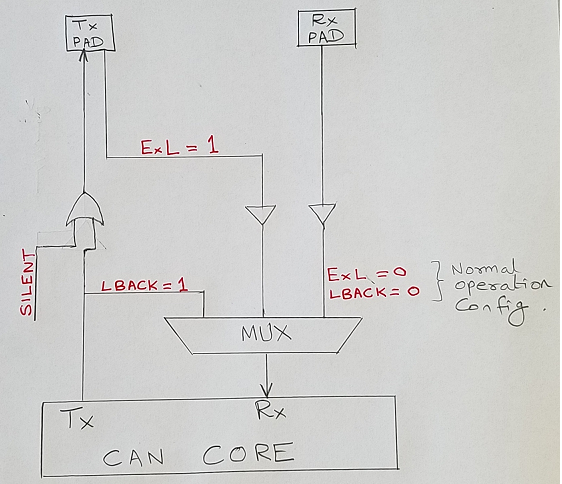
请有人解释 TMS320F28377S 中回送模式和外部回送模式之间的区别吗? 我很困惑模块是否会在环回模式和外部环回模式下将位发送到收发器(我正在使用 Launchpad 以便收发器可用)。
参考手册指出、在环回模式下:
"仍然可以在 CAN_TXPin 上监控发送的消息。
为了独立于外部刺激、CAN 内核忽略确认错误(隐性)
数据/远程帧的确认时隙中采样的位)。
注意:在回送模式下、从 CAN 内核到 Tx 引脚的信号路径、Tx 引脚本身以及信号
从 Tx 引脚返回 CAN 内核的路径将被忽略。"
在外部环回模式中:
'它包括从 CAN 内核到 Tx 引脚的信号路径、Tx 引脚本身以及从 Tx 引脚返回 CAN 内核的信号路径。 当选择外部回送模式时、CAN 内核被连接至 Tx 引脚的输入缓冲器。 进行了比较
配置、则可以测试 Tx 引脚 IO 电路。"
我的疑问是:
1) 1)这是否意味着在环回模式下、位不会发送到收发器(并最终发送到总线)? 如果是、如何按照参考手册中的说明监控消息? 如果我们没有收到实际的接收器值、会发生什么确认错误?
2) 2)关于外部环回、"从内核到 TX 引脚、TX 引脚本身以及从 TX 引脚返回内核的信号路径"是什么? 该路径是否用于监控位错误? 在本例中、模块是否向收发器发送消息?
由于我是 CAN 的初学者、我对参考手册中的几个陈述感到困惑、并发现很难对整个工作进行评价。