

请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TMS320F28069M 大家好。
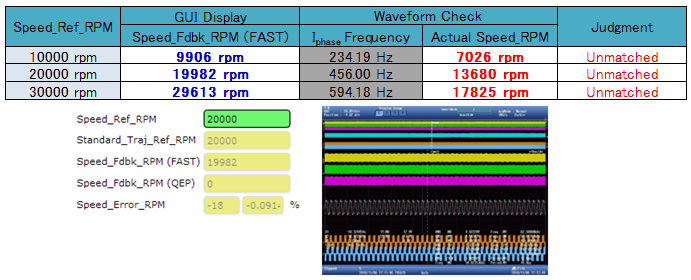
问题:
1.为什么显示的速度反馈与使用相电流和以下公式计算的实际速度不同?
2.是否有其他方法来确认实际转速(rpm)? 目前尚未进行片上调试。 有必要吗?
公式:
实际转速=(2*f/p)*60 假设:P=4 (极数)
f =相电流的频率
(使用的电路板为 LaunchpadXL-TMS320F28069M + BoostXL-DRV8305EVM)
实际速度结果:
希望 有反馈。
此致、
Muriel
