Other Parts Discussed in Thread: SYSCONFIG
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TMS320F28075 "Thread:SysConfig"中讨论的其他器件
您好:
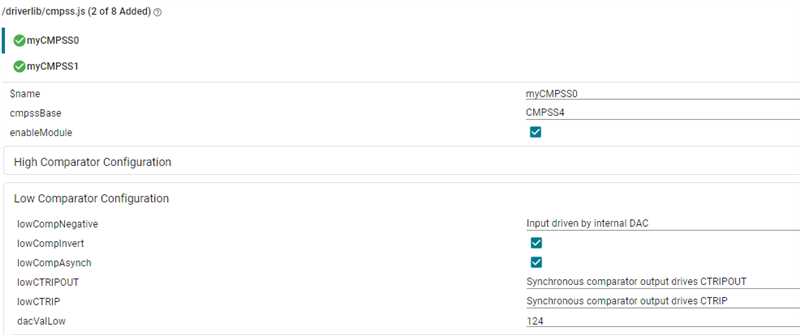
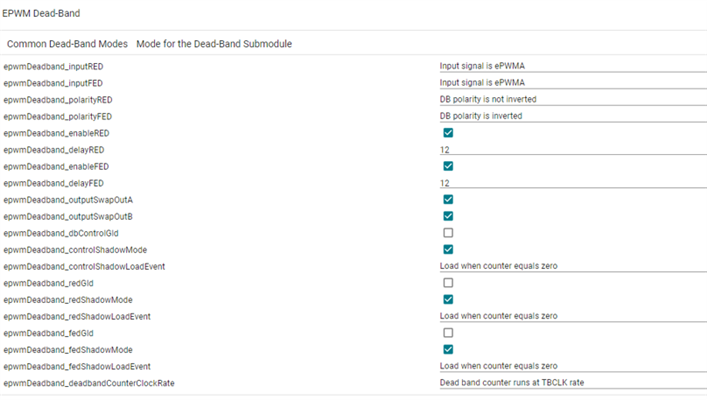
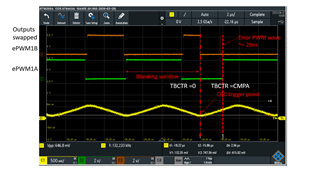
我们目前正在实施一个升压转换器、该转换器需要钳制 PWMH 占空比。 目前、我的方法是使用 CMPSS 模块+ ePWM XBAR + DC +跳匣区域 CBC 来完成。 然而、在 CBC 被触发后、PWMH 端的波形将有一个额外的错误波形。 键入、下图是我的 F28075 SysConfig 和实验图片。