


请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TMS320F28335 主题中讨论的其他器件:C2000WARE、 controlSUITE、 TMDSPREX28335
大家好、
我们的客户有几个关于 C2000的 IQMath 库的问题:
1.以下行的含义是什么: (_IQ) AdcRegs.ADCRESULT0
(_IQ)是否用于指定 Adcresult0寄存器的内容并将其转换为全局 IQ 格式?
2. 在其中一个示例代码中,ADC 数据的读取方式如下: _IQ16toIQ ((_IQ) AdcRegs.ADCRESULT0);
2. 在其中一个示例代码中,ADC 数据的读取方式如下: _IQ16toIQ ((_IQ) AdcRegs.ADCRESULT0);
ADCResult0正从 IQ16转换为全局 IQ 格式。 在浮点样本代码中、ADC 结果右移4个位置、或从已包含右移4个位置数据的 ADCMirror 寄存器中选择结果。 为什么 ADCResult 寄存器内容未在上述行中右移4次? 您能解释一下以上行的工作吗?
但可以使用以下两个语法中的任何一个:
_IQ12toIQ ((_IQ) AdcMirror.ADCRESULT0);
_IQ12toIQ ((_IQ) AdcRegs.ADCRESULT0>>4);
_IQ12toIQ ((_IQ) AdcMirror.ADCRESULT0);
_IQ12toIQ ((_IQ) AdcRegs.ADCRESULT0>>4);
三个语法是否彼此不同? 哪一种方法更好?
3.在同一示例代码中,也有以下两行:
3.在同一示例代码中,也有以下两行:
SUB =_IQ (1.5);
_IQmpy (AdcFsVoltage、_IQ16toIQ (_IQ) AdcRegs.ADCRESULT0)-(sub);
根据这两个指令、将从 ADCRESULT0的内容中减去1.5以获得双极输出(例如:交流电压或交流电流)。 我在这个假设中是否正确?
在浮点模式下、我使用了 Y = Mx + C 方法(并计算了 m 和 c 的值)将信号的实际值与 ADCRESULT0寄存器的结果相关联。 在本例中、是否仍需要使用 OFFSET =_IQ (1.5)? 或者、我可以使用我自己从校准过程中获得的偏移值吗?
4. 我正在做一个逆变器. 在执行整个控制并获得调制指数值后、我是否应该将调制指数从 IQ 格式转换为浮点、然后分配给6个 EPWM 寄存器中的任何一个的 CMPA 或 CMPB?
5、 我如何执行 IQ 格式的"if 语句"?
6. 我是在我的代码中定义 global-Q 值还是应该在 IQmath.h 头文件中更改它?
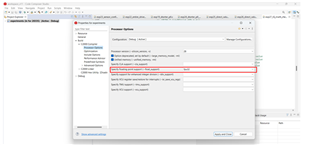
7. 在以下屏幕截图中的"指定浮点支持"选项中、我是否需要 FPU32库支持或 softlib? 或者我应该保留 FPU32库支持并在代码中包含 IQmath.h?
很抱歉列出了很多问题、但希望您能帮助我们。 提前感谢!
此致、
Jejomar
4. 我正在做一个逆变器. 在执行整个控制并获得调制指数值后、我是否应该将调制指数从 IQ 格式转换为浮点、然后分配给6个 EPWM 寄存器中的任何一个的 CMPA 或 CMPB?
5、 我如何执行 IQ 格式的"if 语句"?
6. 我是在我的代码中定义 global-Q 值还是应该在 IQmath.h 头文件中更改它?
7. 在以下屏幕截图中的"指定浮点支持"选项中、我是否需要 FPU32库支持或 softlib? 或者我应该保留 FPU32库支持并在代码中包含 IQmath.h?
很抱歉列出了很多问题、但希望您能帮助我们。 提前感谢!
此致、
Jejomar


