请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:LAUNCHXL-F280025C 主题中讨论的其他器件: C2000WARE
您好!
该实验示例使用了 PWM 时间周期数宏、我认为这是用于使用 LAUNCHXL-F280025C 的100Mhz 系统时钟。
#define USER_M1_PWM_TBPRD_NUM (uint16_t)(USER_SYSTEM_FREQ_MHz * 1000.0f / USER_M1_PWM_FREQ_kHz / 2.0f)
HAL_setupPWMs ()正在使用该宏设置 pwmPeriodCycles。
uint16_t pwmPeriodCycles =(uint16_t)(USER_M1_PWM_TBPRD_NUM);
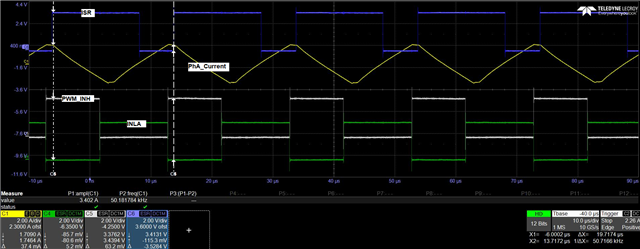
我计划在定制电路板上以50kHz PWM 和200MHz 的系统时钟运行。 对于200MHz 系统时钟、这个宏的建议值是多少? 我尝试了几种组合。 例如、如果我在宏中除以4以补偿系统时钟加倍、那么 我的 PWM 输出为 50Hz、但示例未运行。 TBPRD 为1000、CMPA 为500。
如果我尝试将 TBPRD 设置为2500、将 CMPA 设置为1250 (除以1.6)、则我的 输出 PWM 为20kHz、而目标 PWM 为50kHz。

void HAL_setupPWMs(HAL_MTR_Handle handle)
{
HAL_MTR_Obj *obj = (HAL_MTR_Obj *)handle;
uint16_t cnt;
uint16_t pwmPeriodCycles = (uint16_t)(USER_M1_PWM_TBPRD_NUM);
uint16_t numPWMTicksPerISRTick = USER_M1_NUM_PWM_TICKS_PER_ISR_TICK;
// disable the ePWM module time base clock sync signal
// to synchronize all of the PWMs
SysCtl_disablePeripheral(SYSCTL_PERIPH_CLK_TBCLKSYNC);
// turns off the outputs of the EPWM peripherals which will put the power
// switches into a high impedance state.
EPWM_forceTripZoneEvent(obj->pwmHandle[0], EPWM_TZ_FORCE_EVENT_OST);
EPWM_forceTripZoneEvent(obj->pwmHandle[1], EPWM_TZ_FORCE_EVENT_OST);
EPWM_forceTripZoneEvent(obj->pwmHandle[2], EPWM_TZ_FORCE_EVENT_OST);
#if defined(BSXL8323RS_REVA) || defined(BSXL8323RH_REVB) || \
defined(BSXL8353RS_REVA) || defined(BSXL8316RT_REVA) || \
defined(BSXL3PHGAN_REVA) || defined(HVMTRPFC_REV1P1) || \
defined(DRV8329AEVM_REVA)
for(cnt=0; cnt<3; cnt++)
{
// setup the Time-Base Control Register (TBCTL)
EPWM_setTimeBaseCounterMode(obj->pwmHandle[cnt],
EPWM_COUNTER_MODE_UP_DOWN);
EPWM_disablePhaseShiftLoad(obj->pwmHandle[cnt]);
EPWM_setPeriodLoadMode(obj->pwmHandle[cnt], EPWM_PERIOD_DIRECT_LOAD);
/* Commented JS
EPWM_enableSyncOutPulseSource(obj->pwmHandle[cnt],
EPWM_SYNC_OUT_PULSE_ON_SOFTWARE);
*/
EPWM_setClockPrescaler(obj->pwmHandle[cnt], EPWM_CLOCK_DIVIDER_2,
EPWM_HSCLOCK_DIVIDER_2);
EPWM_setCountModeAfterSync(obj->pwmHandle[cnt],
EPWM_COUNT_MODE_UP_AFTER_SYNC);
EPWM_setEmulationMode(obj->pwmHandle[cnt], EPWM_EMULATION_FREE_RUN);
// setup the Timer-Based Phase Register (TBPHS)
EPWM_setPhaseShift(obj->pwmHandle[cnt], 0);
// setup the Time-Base Counter Register (TBCTR)
EPWM_setTimeBaseCounter(obj->pwmHandle[cnt], 0);
// setup the Time-Base Period Register (TBPRD)
// set to zero initially
EPWM_setTimeBasePeriod(obj->pwmHandle[cnt], 0);
// setup the Counter-Compare Control Register (CMPCTL)
EPWM_setCounterCompareShadowLoadMode(obj->pwmHandle[cnt],
EPWM_COUNTER_COMPARE_A,
EPWM_COMP_LOAD_ON_CNTR_ZERO);
EPWM_setCounterCompareShadowLoadMode(obj->pwmHandle[cnt],
EPWM_COUNTER_COMPARE_B,
EPWM_COMP_LOAD_ON_CNTR_ZERO);
EPWM_setCounterCompareShadowLoadMode(obj->pwmHandle[cnt],
EPWM_COUNTER_COMPARE_C,
EPWM_COMP_LOAD_ON_CNTR_ZERO);
EPWM_setCounterCompareShadowLoadMode(obj->pwmHandle[cnt],
EPWM_COUNTER_COMPARE_D,
EPWM_COMP_LOAD_ON_CNTR_ZERO);
#if defined(MOTOR1_ISBLDC)
// setup the Action-Qualifier Output A Register (AQCTLA)
EPWM_setActionQualifierAction(obj->pwmHandle[cnt],
EPWM_AQ_OUTPUT_A,
EPWM_AQ_OUTPUT_HIGH,
EPWM_AQ_OUTPUT_ON_TIMEBASE_UP_CMPA);
EPWM_setActionQualifierAction(obj->pwmHandle[cnt],
EPWM_AQ_OUTPUT_A,
EPWM_AQ_OUTPUT_LOW,
EPWM_AQ_OUTPUT_ON_TIMEBASE_DOWN_CMPA);
// setup the Action-qualifier Continuous Software Force Register (AQCSFRC)
EPWM_setActionQualifierContSWForceAction(obj->pwmHandle[cnt],
EPWM_AQ_OUTPUT_B,
EPWM_AQ_SW_OUTPUT_LOW);
// setup the Dead-Band Generator Control Register (DBCTL)
EPWM_setDeadBandDelayMode(obj->pwmHandle[cnt], EPWM_DB_RED, false);
EPWM_setDeadBandDelayMode(obj->pwmHandle[cnt], EPWM_DB_FED, false);
#else //!MOTOR1_ISBLDC
#if defined(MOTOR1_DCLINKSS)
// setup the Action-Qualifier Output A Register (AQCTLA)
EPWM_setActionQualifierAction(obj->pwmHandle[cnt],
EPWM_AQ_OUTPUT_A,
EPWM_AQ_OUTPUT_HIGH,
EPWM_AQ_OUTPUT_ON_TIMEBASE_UP_CMPA);
EPWM_setActionQualifierAction(obj->pwmHandle[cnt],
EPWM_AQ_OUTPUT_A,
EPWM_AQ_OUTPUT_LOW,
EPWM_AQ_OUTPUT_ON_TIMEBASE_DOWN_CMPB);
EPWM_setActionQualifierAction(obj->pwmHandle[cnt],
EPWM_AQ_OUTPUT_A,
EPWM_AQ_OUTPUT_LOW,
EPWM_AQ_OUTPUT_ON_TIMEBASE_ZERO);
EPWM_setActionQualifierAction(obj->pwmHandle[cnt],
EPWM_AQ_OUTPUT_A,
EPWM_AQ_OUTPUT_HIGH,
EPWM_AQ_OUTPUT_ON_TIMEBASE_PERIOD);
#else // !(MOTOR1_DCLINKSS)
// setup the Action-Qualifier Output A Register (AQCTLA)
EPWM_setActionQualifierAction(obj->pwmHandle[cnt],
EPWM_AQ_OUTPUT_A,
EPWM_AQ_OUTPUT_HIGH,
EPWM_AQ_OUTPUT_ON_TIMEBASE_UP_CMPA);
EPWM_setActionQualifierAction(obj->pwmHandle[cnt],
EPWM_AQ_OUTPUT_A,
EPWM_AQ_OUTPUT_HIGH,
EPWM_AQ_OUTPUT_ON_TIMEBASE_PERIOD);
EPWM_setActionQualifierAction(obj->pwmHandle[cnt],
EPWM_AQ_OUTPUT_A,
EPWM_AQ_OUTPUT_LOW,
EPWM_AQ_OUTPUT_ON_TIMEBASE_DOWN_CMPA);
EPWM_setActionQualifierAction(obj->pwmHandle[cnt],
EPWM_AQ_OUTPUT_A,
EPWM_AQ_OUTPUT_LOW,
EPWM_AQ_OUTPUT_ON_TIMEBASE_ZERO);
#endif // !(MOTOR1_DCLINKSS)
// setup the Dead-Band Generator Control Register (DBCTL)
EPWM_setDeadBandDelayMode(obj->pwmHandle[cnt], EPWM_DB_RED, true);
EPWM_setDeadBandDelayMode(obj->pwmHandle[cnt], EPWM_DB_FED, true);
// select EPWMA as the input to the dead band generator
EPWM_setRisingEdgeDeadBandDelayInput(obj->pwmHandle[cnt],
EPWM_DB_INPUT_EPWMA);
// configure the right polarity for active high complementary config.
EPWM_setDeadBandDelayPolarity(obj->pwmHandle[cnt],
EPWM_DB_RED,
EPWM_DB_POLARITY_ACTIVE_HIGH);
EPWM_setDeadBandDelayPolarity(obj->pwmHandle[cnt],
EPWM_DB_FED,
EPWM_DB_POLARITY_ACTIVE_LOW);
// setup the Dead-Band Rising Edge Delay Register (DBRED)
EPWM_setRisingEdgeDelayCount(obj->pwmHandle[cnt], MTR1_PWM_DBRED_CNT);
// setup the Dead-Band Falling Edge Delay Register (DBFED)
EPWM_setFallingEdgeDelayCount(obj->pwmHandle[cnt], MTR1_PWM_DBFED_CNT);
#endif //!MOTOR1_ISBLDC
// setup the PWM-Chopper Control Register (PCCTL)
EPWM_disableChopper(obj->pwmHandle[cnt]);
// setup the Trip Zone Select Register (TZSEL)
EPWM_disableTripZoneSignals(obj->pwmHandle[cnt], HAL_TZSEL_SIGNALS_ALL);
}
// BSXL8323RS_REVA || BSXL8323RH_REVB || BSXL8353RS_REVA || \
// BSXL8316RT_REVA || BSXL3PHGAN_REVA || HVMTRPFC_REV1P1 || \
// DRV8329AEVM_REVA
#else
#error The PWM is not configured for motor_1 control
#endif // boards
#if defined(MOTOR1_ISBLDC)
// setup the Event Trigger Selection Register (ETSEL)
EPWM_setInterruptSource(obj->pwmHandle[0], EPWM_INT_TBCTR_ZERO);
EPWM_disableInterrupt(obj->pwmHandle[0]);
EPWM_setADCTriggerSource(obj->pwmHandle[0],
EPWM_SOC_A, EPWM_SOC_TBCTR_ZERO);
EPWM_enableADCTrigger(obj->pwmHandle[0], EPWM_SOC_A);
EPWM_setADCTriggerSource(obj->pwmHandle[0],
EPWM_SOC_B, EPWM_SOC_TBCTR_U_CMPB);
EPWM_enableADCTrigger(obj->pwmHandle[0], EPWM_SOC_B);
#elif defined(MOTOR1_DCLINKSS)
// setup the Event Trigger Selection Register (ETSEL)
EPWM_setInterruptSource(obj->pwmHandle[0], EPWM_INT_TBCTR_ZERO);
EPWM_enableInterrupt(obj->pwmHandle[0]);
EPWM_setADCTriggerSource(obj->pwmHandle[0],
EPWM_SOC_A, EPWM_SOC_TBCTR_D_CMPC);
EPWM_enableADCTrigger(obj->pwmHandle[0], EPWM_SOC_A);
// ADC SOC trigger for the 1st dc-link current sampling
EPWM_setADCTriggerSource(obj->pwmHandle[1],
EPWM_SOC_A,
EPWM_SOC_TBCTR_U_CMPC);
EPWM_enableADCTrigger(obj->pwmHandle[1], EPWM_SOC_A);
// ADC SOC trigger for the 2nd dc-link current sampling
EPWM_setADCTriggerSource(obj->pwmHandle[1],
EPWM_SOC_B,
EPWM_SOC_TBCTR_U_CMPD);
EPWM_enableADCTrigger(obj->pwmHandle[1], EPWM_SOC_B);
// ADC SOC trigger for the 3rd dc-link current sampling
EPWM_setADCTriggerSource(obj->pwmHandle[2],
EPWM_SOC_A,
EPWM_SOC_TBCTR_D_CMPC);
EPWM_enableADCTrigger(obj->pwmHandle[2], EPWM_SOC_A);
// ADC SOC trigger for the 4th dc-link current sampling
EPWM_setADCTriggerSource(obj->pwmHandle[2],
EPWM_SOC_B,
EPWM_SOC_TBCTR_D_CMPD);
EPWM_enableADCTrigger(obj->pwmHandle[2], EPWM_SOC_B);
#else //!(MOTOR1_ISBLDC || MOTOR1_DCLINKSS)
// setup the Event Trigger Selection Register (ETSEL)
EPWM_setInterruptSource(obj->pwmHandle[0], EPWM_INT_TBCTR_ZERO);
EPWM_enableInterrupt(obj->pwmHandle[0]);
EPWM_setADCTriggerSource(obj->pwmHandle[0],
EPWM_SOC_A, EPWM_SOC_TBCTR_D_CMPC);
EPWM_enableADCTrigger(obj->pwmHandle[0], EPWM_SOC_A);
#endif // !(MOTOR1_ISBLDC || MOTOR1_DCLINKSS)
// setup the Event Trigger Prescale Register (ETPS)
if(numPWMTicksPerISRTick > 15)
{
numPWMTicksPerISRTick = 15;
}
else if(numPWMTicksPerISRTick < 1)
{
numPWMTicksPerISRTick = 1;
}
EPWM_setInterruptEventCount(obj->pwmHandle[0], numPWMTicksPerISRTick);
EPWM_setADCTriggerEventPrescale(obj->pwmHandle[0], EPWM_SOC_A,
numPWMTicksPerISRTick);
EPWM_setADCTriggerEventPrescale(obj->pwmHandle[0], EPWM_SOC_B,
numPWMTicksPerISRTick);
#if defined(MOTOR1_DCLINKSS)
EPWM_setADCTriggerEventPrescale(obj->pwmHandle[1], EPWM_SOC_A,
numPWMTicksPerISRTick);
EPWM_setADCTriggerEventPrescale(obj->pwmHandle[1], EPWM_SOC_B,
numPWMTicksPerISRTick);
EPWM_setADCTriggerEventPrescale(obj->pwmHandle[2], EPWM_SOC_A,
numPWMTicksPerISRTick);
EPWM_setADCTriggerEventPrescale(obj->pwmHandle[2], EPWM_SOC_B,
numPWMTicksPerISRTick);
#endif //MOTOR1_DCLINKSS
// setup the Event Trigger Clear Register (ETCLR)
EPWM_clearEventTriggerInterruptFlag(obj->pwmHandle[0]);
EPWM_clearADCTriggerFlag(obj->pwmHandle[0], EPWM_SOC_A);
EPWM_clearADCTriggerFlag(obj->pwmHandle[0], EPWM_SOC_B);
// since the PWM is configured as an up/down counter, the period register is
// set to one-half of the desired PWM period
EPWM_setTimeBasePeriod(obj->pwmHandle[0], pwmPeriodCycles);
EPWM_setTimeBasePeriod(obj->pwmHandle[1], pwmPeriodCycles);
EPWM_setTimeBasePeriod(obj->pwmHandle[2], pwmPeriodCycles);
// write the PWM data value for ADC trigger
EPWM_setCounterCompareValue(obj->pwmHandle[0], EPWM_COUNTER_COMPARE_C, 10);
// write the PWM data value for ADC trigger
#if defined(MOTOR1_DCLINKSS)
EPWM_clearADCTriggerFlag(obj->pwmHandle[1], EPWM_SOC_A);
EPWM_clearADCTriggerFlag(obj->pwmHandle[1], EPWM_SOC_B);
EPWM_clearADCTriggerFlag(obj->pwmHandle[2], EPWM_SOC_A);
EPWM_clearADCTriggerFlag(obj->pwmHandle[2], EPWM_SOC_B);
EPWM_setCounterCompareValue(obj->pwmHandle[1],
EPWM_COUNTER_COMPARE_C, pwmPeriodCycles>>1);
EPWM_setCounterCompareValue(obj->pwmHandle[1],
EPWM_COUNTER_COMPARE_D, pwmPeriodCycles>>1);
EPWM_setCounterCompareValue(obj->pwmHandle[2],
EPWM_COUNTER_COMPARE_C, pwmPeriodCycles>>1);
EPWM_setCounterCompareValue(obj->pwmHandle[2],
EPWM_COUNTER_COMPARE_D, pwmPeriodCycles>>1);
#endif //MOTOR1_DCLINKSS
// enable the ePWM module time base clock sync signal
SysCtl_enablePeripheral(SYSCTL_PERIPH_CLK_TBCLKSYNC);
return;
} // end of HAL_setupPWMs() function