请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TMDSHVMTRPFCKIT
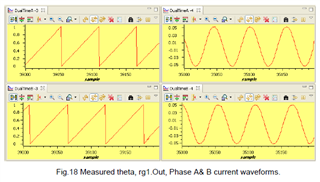
我已经 使用 F28035微控制器设计了与 TMDSHVMTRPFCKIT 类似的自己的 PCB。 我正在完成 HVACI_Sensored 中的电平、但我仍坚持认为在3b 级上无法解决这个问题。 《三相感应电机的传感磁场定向控制》手册提到"ElecTheta 和 Out 是一个锯齿波形并具有同样的周期"、如下图所示。
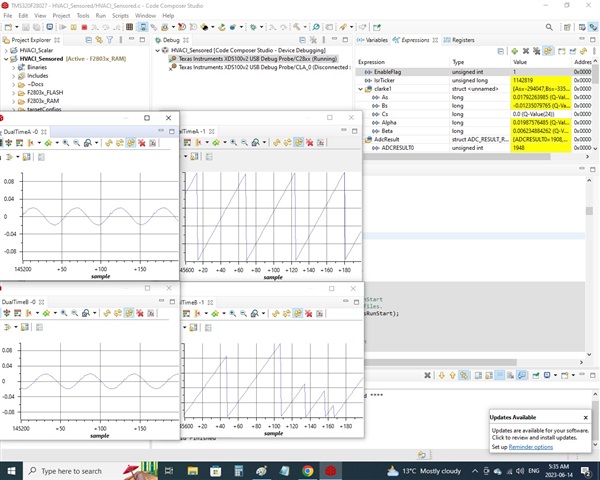
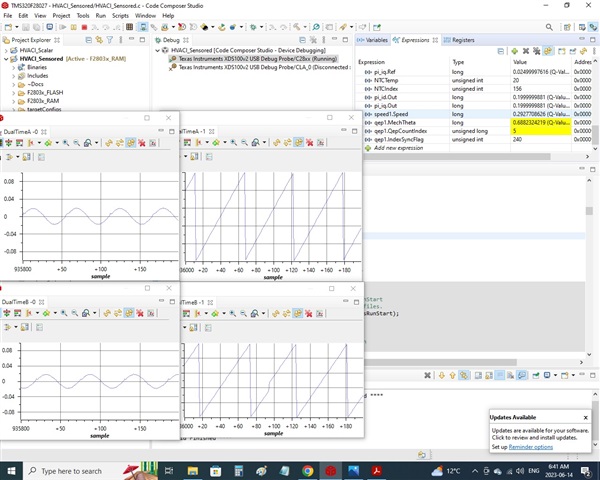
我的"rg1.Out 和 speed1.ElecTheta 曲线如下所示:
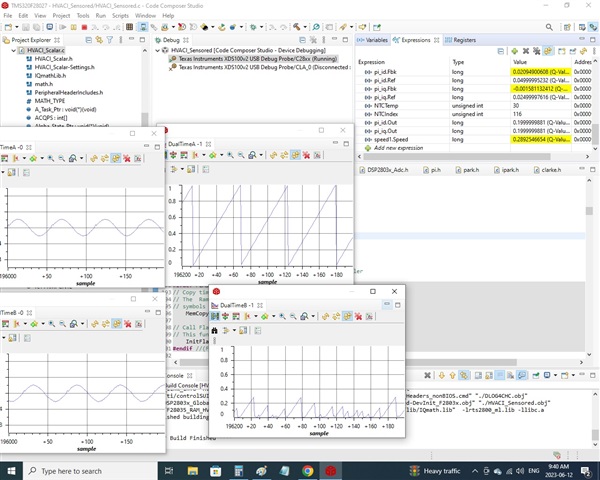
speed1.ElecTheta 曲线出现一些问题。 "Watch"窗口中的 speed1.Speed 信号似乎工作正常。
我认为该问题与 QEP 索引信号有关。 当我用手旋转电机时、qep1.QebCountIndex 将从4,093,4094、0、1、2增加、并且不会进一步增加。
有人对造成差异的原因有任何见解吗?