请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TMDSHVMTRINSPIN 主题中讨论的其他器件:MOTORWARE
您好!
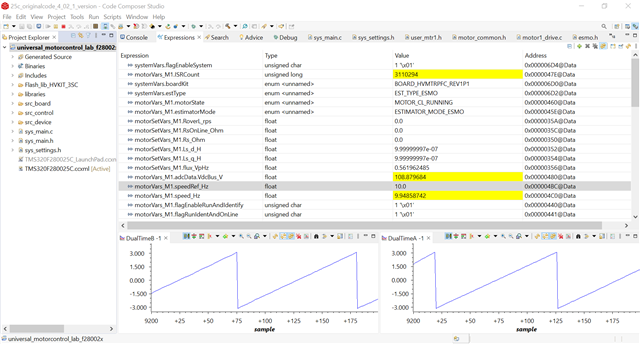
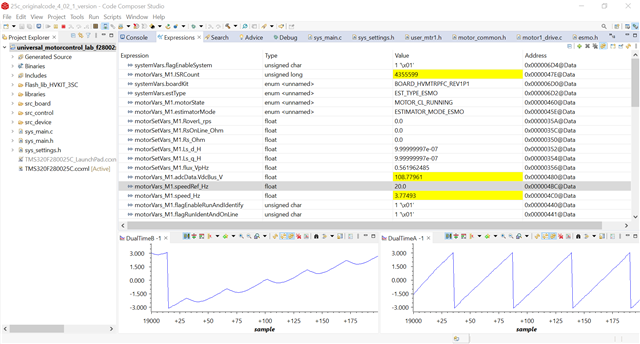
我们正在实施旋转 FOC、我们已经遇到了速度赫兹不跟随速度参考的一个问题、现在它已经被清除。在构建4中、电机参数识别后、我们想要运行一个采用估算器/观测器 模式的闭环运行。 但它并未运行。我们想要更改任何代码部分或设置。
请关注这个问题
您好!
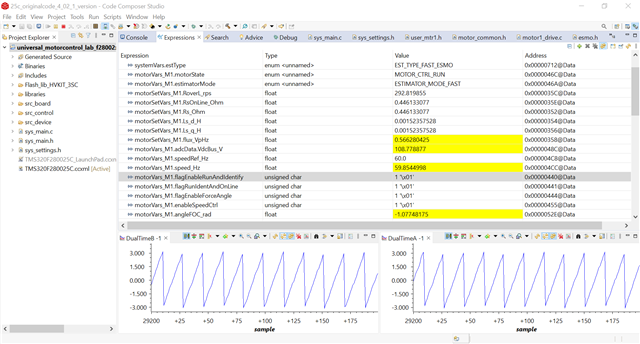
我们正在实施旋转 FOC、我们已经遇到了速度赫兹不跟随速度参考的一个问题、现在它已经被清除。在构建4中、电机参数识别后、我们想要运行一个采用估算器/观测器 模式的闭环运行。 但它并未运行。我们想要更改任何代码部分或设置。
请关注这个问题