请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TMS320F280034 主题中讨论的其他器件:SysConfig
尊敬的 E2E 论坛:
我们正在开发一个在280034上使用 ePWM1的应用、以驱动半桥功率级。 ePWM1H 用于驱动高侧器件、ePWM1L 驱动低侧器件。 该工程使用 SysConfig 配置 PWM 外设。
我要确保在器件上电时 PWM 输出的行为。 我认为 PWM 输出在配置为 ePWM 之前应该是高阻抗、并且我们使用了外部下拉电阻器来确保高侧和低侧 PWM 都是低电平、直到引脚作为 PWM 输出正常运行。 作为完整性检查、我们在上电期间测量了 ePWM1L 和 ePWM1H 信号、并观察到 ePWM1L 信号在正常 PWM 运行开始之前保持高电平50us。 是否有办法确保在280034上电期间 ePWM 输出始终为低电平?
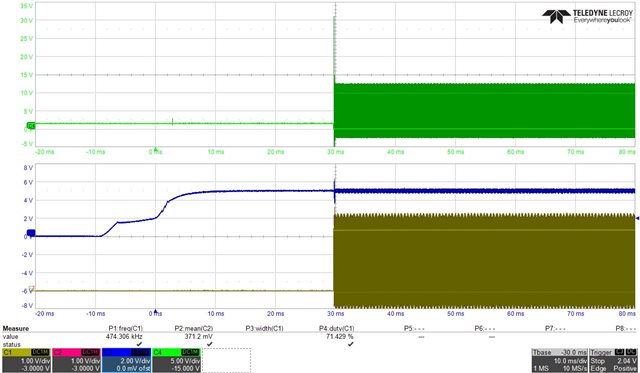
下面是对启动期间行为的测量。 蓝色走线(CH3)表示为定制板供电的+5V 电压轨的上升沿。 它通过+5V 至+3V3直流/直流转换器为280034供电。 ePWM1L 是黄色迹线(CH1)、ePWM1H 是红色迹线(CH2)。 半桥的开关节点为绿色(CH4)。 PWM 在上电后几十毫秒开始。
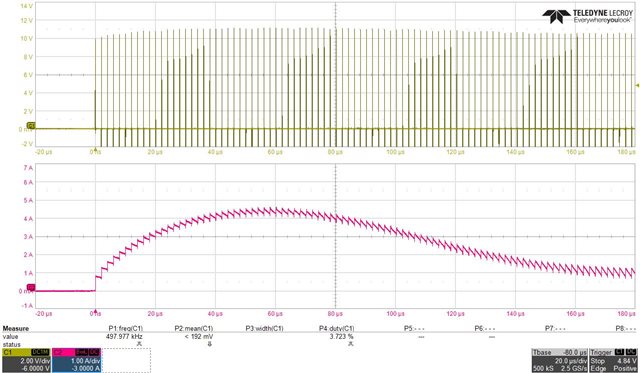
如果我们放大前几个开关周期、我们可以看到:-
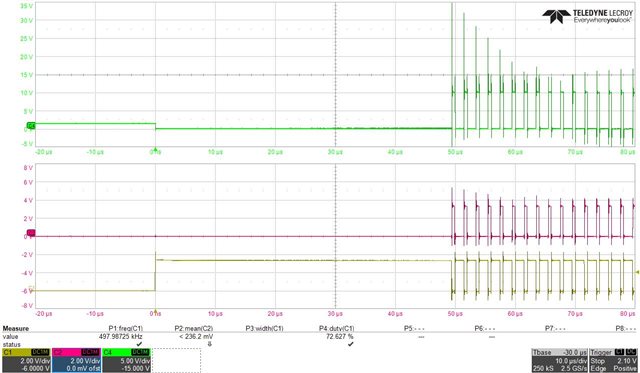
在这里、我们可以看到 ePWM1L (黄色迹线、CH1)在 PWM 开始之前保持高电平大约50us。 这在这个电路板上不是问题、因为栅极驱动器使用自举电路来生成实际的栅极驱动波形、但是我仍然认为 ePWM1L 在 PWM 运行开始前应该为低电平。
有什么想法吗?
谢谢、Iain