请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:BOOSTXL-DRV8323RH 您好!
如果我的代码在 runMotor1Control 例程中运行,它的工作是完美的,例如设置 obj->flagEnableRunAndIdentify = false ...
void runMotor1Control(MOTOR_Handle handle)
{
MOTOR_Vars_t *obj = (MOTOR_Vars_t *)handle;
MOTOR_SetVars_t *objSets = (MOTOR_SetVars_t *)(obj->motorSetsHandle);
USER_Params *objUser = (USER_Params *)(obj->userParamsHandle);
.
.
.
if (objSets->command_MotorIdentify)
{
obj->flagEnableRunAndIdentify = false;
obj->flagRunIdentAndOnLine = false;
obj->speedRef_Hz = 0;
obj->flagEnableMotorIdentify = true;
objUser->motor_Rs_Ohm = 0.001f;
}
return;
}
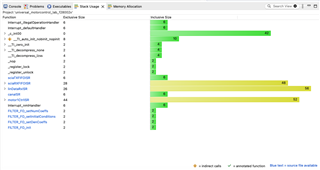
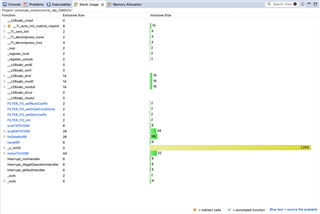
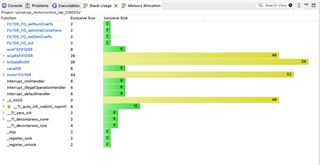
但是、当我创建子例程来处理它时、它会跳转到 Interrupt_illegalOperationHandler
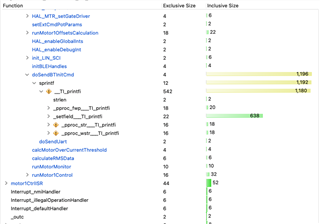
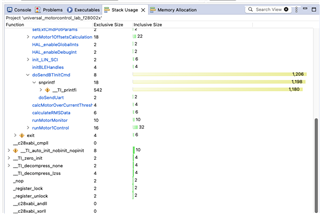
void doCommandMotorIdentify(MOTOR_Handle handle)
{
MOTOR_Vars_t *obj = (MOTOR_Vars_t *)handle;
MOTOR_SetVars_t *objSets = (MOTOR_SetVars_t *)(obj->motorSetsHandle);
USER_Params *objUser = (USER_Params *)(obj->userParamsHandle);
doCommandMotorIdentify(handle);
return;
}
void doCommandMotorIdentify(MOTOR_Handle handle)
{
MOTOR_Vars_t *obj = (MOTOR_Vars_t *)handle;
MOTOR_SetVars_t *objSets = (MOTOR_SetVars_t *)(obj->motorSetsHandle);
USER_Params *objUser = (USER_Params *)(obj->userParamsHandle);
if (objSets->command_MotorIdentify)
{
obj->flagEnableRunAndIdentify = false;
obj->flagRunIdentAndOnLine = false;
obj->speedRef_Hz = 0;
obj->flagEnableMotorIdentify = true;
objUser->motor_Rs_Ohm = 0.001f;
}
return;
}
在 doCommandMotorIdentify()例程内,语句
objUser->MOTOR_MOTOR_0.001f Rs_Ohm 肯定导致了故障:(
另请注意此语句
如果(objSets->COMMAND_MotorIdentify == true)将导致故障
但是这个声明是有效的
if (objSets->COMMAND_MotorIdentify)
有人能帮助解释造成这种情况 的原因吗?
丹尼