主题中讨论的其他器件: C2000WARE、 SysConfig
各位同事:
我正在学习使用德州仪器的微控制器、以具有 controlCARD 和集线卡的 TMS320F28388D 为例。
为了了解如何对它们进行编程、我已经开始进行 C2000Ware 实验、如下所示: https://dev.ti.com/tirex/explore/node?node=A__AVSjOwDYHkfv9LUHQuulzA__C2000-ACADEMY__3H1LnqB__LATEST
本实验涉及使用 ADC 和 PWM。 我能够执行实验、因为该实验设置正确。
但我的想法是在该实验室中测试以下内容。
-我希望 ADC 读取由另一个独立于 ADC 触发器的 PWM 创建的 PWM 生成的方波信号。
-我想看看不同的采样率如何影响获得的信号。
对于具有 PWM 的 ADC 触发器与 ADC 采样率之间的关系以及它们的关系、我有点困惑。
我想在 ADC 上创建一个 PWM 触发器、这个触发器在每次转换完成时都会触发 ADC。 我不知道使用 PWM 实现此功能或设置 ADC 采样率并让其在每次完成转换时触发是否理想。
这是我有的代码 、从实验室中复制和粘贴、我不在乎它、因为它不会影响我想添加的功能(除了 ADC 的读取)
//############################################################################# // // FILE: lab_main.c // // TITLE: adc lab // // C2K ACADEMY URL: dev.ti.com/.../node // //! \addtogroup academy_lab_list //! <h1> Using Analog Subsystems Lab - Sysconfig </h1> //! //! The objective of this lab exercise is to become familiar with the //! programming and operation of the on-chip analog-to-digital converter (ADC). //! The microcontroller (MCU) will be setup to sample a single ADC input //! channel at a prescribed sampling rate and store the conversion result in a //! circular memory buffer. In the second part of this lab exercise, the //! digital-to-analog converter (DAC) will be explored. //! //! \b External \b Connections \n //! - Refer to Academy Lab instruction for exact pin for your device/board //! //! \b Watch \b Variables \n //! - None. //! //############################################################################# // $Copyright: // Copyright (C) 2022 Texas Instruments Incorporated - http://www.ti.com // // Redistribution and use in source and binary forms, with or without // modification, are permitted provided that the following conditions // are met: // // Redistributions of source code must retain the above copyright // notice, this list of conditions and the following disclaimer. // // Redistributions in binary form must reproduce the above copyright // notice, this list of conditions and the following disclaimer in the // documentation and/or other materials provided with the // distribution. // // Neither the name of Texas Instruments Incorporated nor the names of // its contributors may be used to endorse or promote products derived // from this software without specific prior written permission. // // THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS // "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT // LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR // A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT // OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, // SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT // LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, // DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY // THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT // (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE // OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE. // $ //############################################################################# // // Included Files // #include "board.h" // // Global variables and definitions // #define ADC_BUF_LEN 50 uint16_t DEBUG_TOGGLE = 1; // Used for real-time mode uint16_t AdcBuf[ADC_BUF_LEN]; // ADC buffer allocation #ifdef DACB_BASE uint16_t DacOutput; uint16_t DacOffset; uint16_t SINE_ENABLE = 0; // quadrature look-up table: contains 4 quadrants of sinusoid data points #define SINE_PTS 25 int QuadratureTable[SINE_PTS] = { 0x0000, // [0] 0.0 0x1FD4, // [1] 14.4 0x3DA9, // [2] 28.8 0x579E, // [3] 43.2 0x6C12, // [4] 57.6 0x79BB, // [5] 72.0 0x7FBE, // [6] 86.4 0x7DBA, // [7] 100.8 0x73D0, // [8] 115.2 0x629F, // [9] 129.6 0x4B3B, // [10] 144.0 0x2F1E, // [11] 158.4 0x100A, // [12] 172.8 0xEFF6, // [13] 187.2 0xD0E2, // [14] 201.6 0xB4C5, // [15] 216.0 0x9D61, // [16] 230.4 0x8C30, // [17] 244.8 0x8246, // [18] 259.2 0x8042, // [19] 273.6 0x8645, // [20] 288.0 0x93EE, // [21] 302.4 0xA862, // [22] 316.8 0xC257, // [23] 331.2 0xE02C // [24] 345.6 }; #endif // // Function Declarations // void initEPWM3(void); __interrupt void INT_myADCA_1_ISR(void); __interrupt void epwm3ISR(void); // // Main // void main(void) { // CPU Initialization Device_init(); Interrupt_initModule(); Interrupt_initVectorTable(); // Configure the GPIOs/ADC/PWM through SysConfig generated files Board_init(); // Enable global interrupts and real-time debug EINT; ERTM; // Main Loop while(1){} } interrupt void INT_myADCA_1_ISR(void) { static uint16_t *AdcBufPtr = AdcBuf; uint16_t LED_count = 0; // Read the ADC Result *AdcBufPtr++ = ADC_readResult(myADCA_RESULT_BASE, myADCA_SOC0); // Brute Force the circular buffer if (AdcBufPtr == (AdcBuf + ADC_BUF_LEN)) { AdcBufPtr = AdcBuf; } // Toggle the pin if(DEBUG_TOGGLE == 1) { GPIO_togglePin(myGPIOToggle); } #ifdef DACB_BASE // Write to DAC-B to create input to ADC-A0 static uint16_t iQuadratureTable = 0; // Quadrature table index if(SINE_ENABLE == 1) { DacOutput = DacOffset + ((QuadratureTable[iQuadratureTable++] ^ 0x8000) >> 5); } else { DacOutput = DacOffset; } if(iQuadratureTable > (SINE_PTS - 1)) // Wrap the index { iQuadratureTable = 0; } DAC_setShadowValue(myDACB_BASE, DacOutput); #endif Interrupt_clearACKGroup(INT_myADCA_1_INTERRUPT_ACK_GROUP); ADC_clearInterruptStatus(myADCA_BASE, ADC_INT_NUMBER1); } // End of ADC ISR // // End of File //
我将通过 SysConfig 配置系统的不同元件
-在第一种情况下(方波信号5kHz,触发 PWM ADC 25kHz):
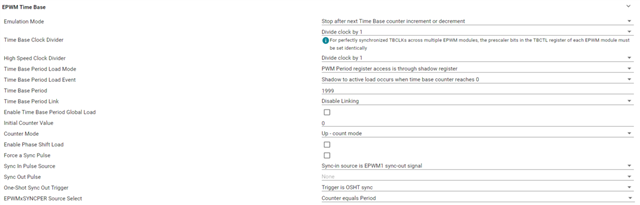
- 使用此设置的 myEPWM4 (使用 PWM 生成的方波信号):
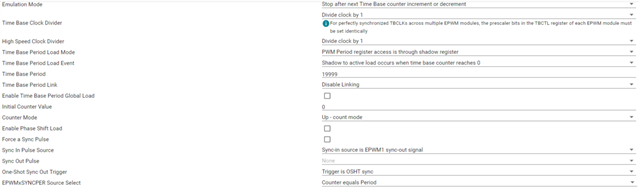



- 使用此设置的 myEPWM1 (ADC 触发):
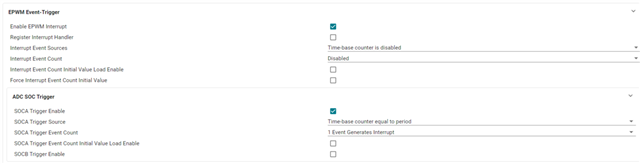

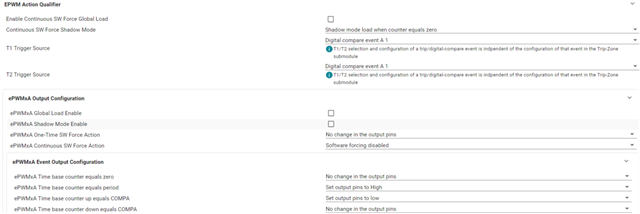
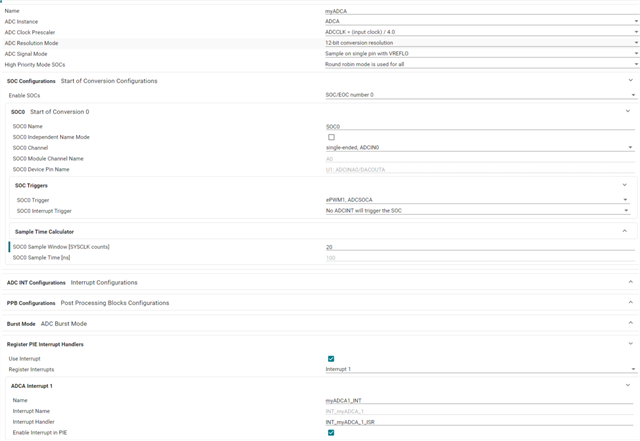
- 采用此设置的 ADC:
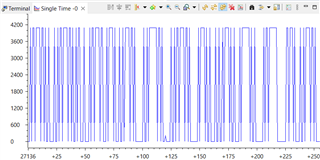
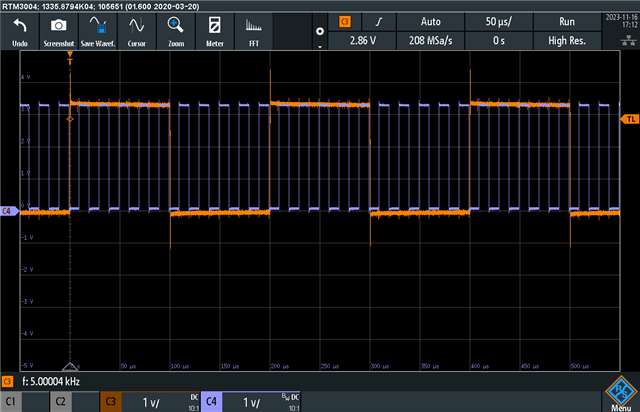
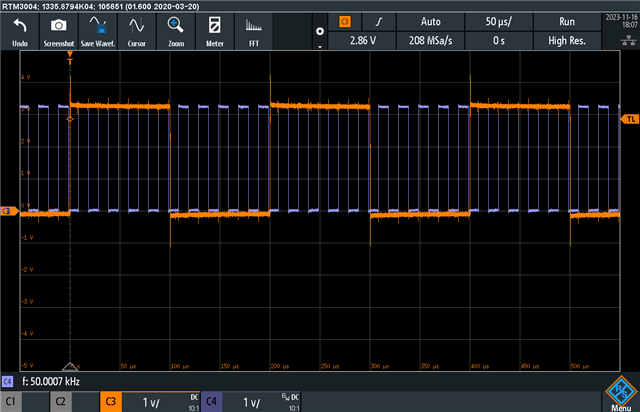
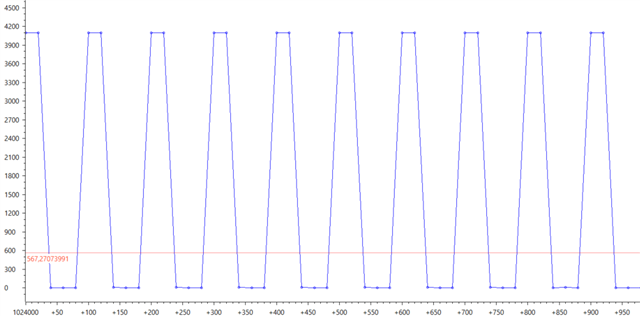
从示波器上可以看到、它们由5kHz 的 PWM 和 ADC 的触发 PWM (在中断 ADC 处理程序中切换、在代码中切换)切换的切换引脚(见代码)生成方波形、在高和低之间切换(在中断 ADC 处理程序中切换、见代码) 约为25kHz。
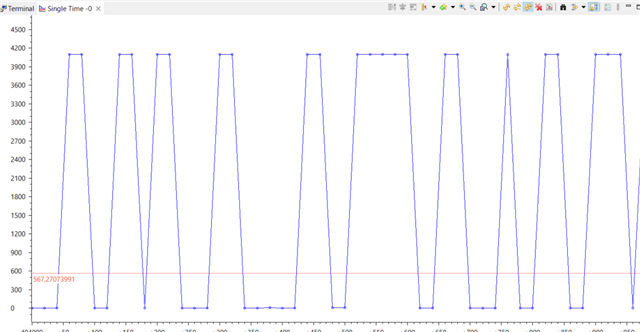
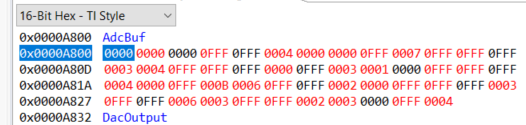
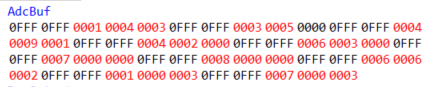
如图所示、转换的结果为:
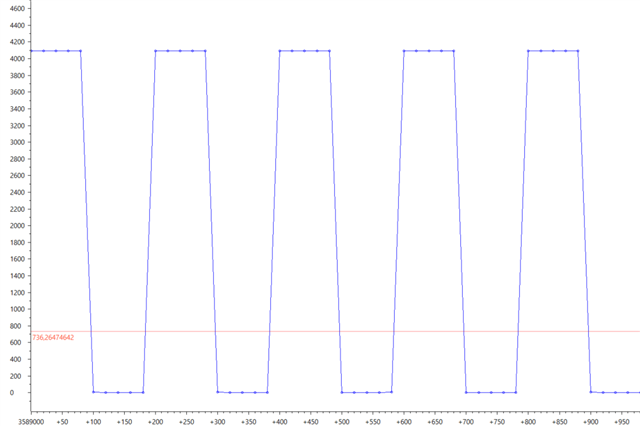
合理的。
现在、当我 从 ADC 饱和中更改"SOC0采样窗口[SYSCLK 计数]"或从 ADC 的 PWM 触发器中更改"时基周期"时、ADC 讲座会非常糟糕、没有任何意义。
我将向您展示更多示例:
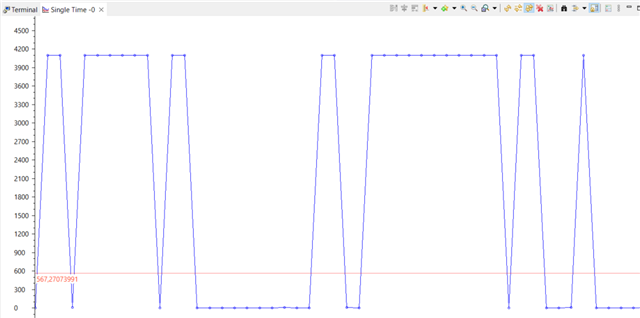
-案例2 ,与第1个示例相同,但将 SOC0采样窗口[SYSCLK 计数]从10更改为200。 ADC 的结果与第一种情况中的结果非常相似(如果更改该参数、我不知道为什么无法获得更多或更少的样本)
-案例3: 与第1个示例相同,但将 ADC 时钟预分频器更 改为 ADCCLK= CLKINPUT/2。 ADC 的结果与第一种情况中的结果
-案例4:与第一个示例相同,但将时基周期更改为999 (第一个扩展量的一半)。 在这种情况下、ADC 结果很糟糕、没有道理(方波输入信号保持不变)
ADC 结果会始终在0和1之间变化、没有任何检测
-案例6:与案例5相同、但使用时基周期1449、结果相同:

-案例6: 与第一个示例相同,但将时基周期更改为3999 (第一个示例的两倍)。 在这种情况下、ADC 结果又很糟糕、没有意义(方波输入信号保持不变)
我想知道的是如何从 ADC 获得更多测量点、以及是否可以通过修改 PWM 触发器或其他方法来实现。 但我想比第一个示例更准确地查看5kHz 信号、我不知道如何操作。
我希望你能帮助我,提前非常感谢你。
佩德罗