请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:DRV8353RS-EVM 主题中讨论的其他器件:DRV8353、
团队、您好!
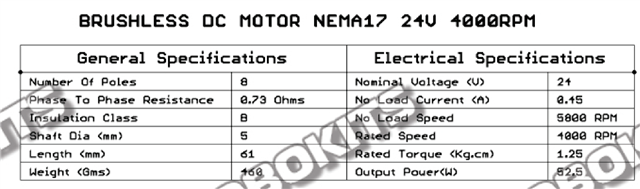
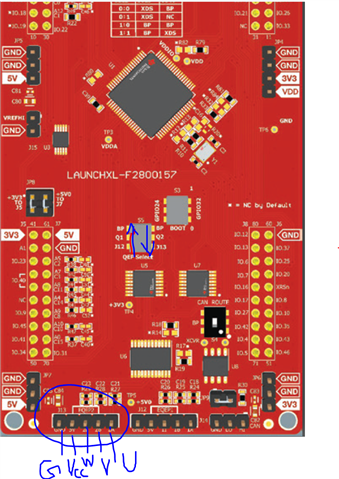
我们正在开发用于 BLDC 电机应用的 DRV8353和 TI launchpad F280015x。 连接 TI 驱动器板和 LaunchPad 时、我们提出了以下查询。
我配置了 UCC 代码、我启用了以下宏 HVMTRPFC_REV1P1、ENC、 BSXL8353RS 找到此代码。
其中一些是必须针对 DRV8353和 TI Launchpad F280015x 配置的宏。
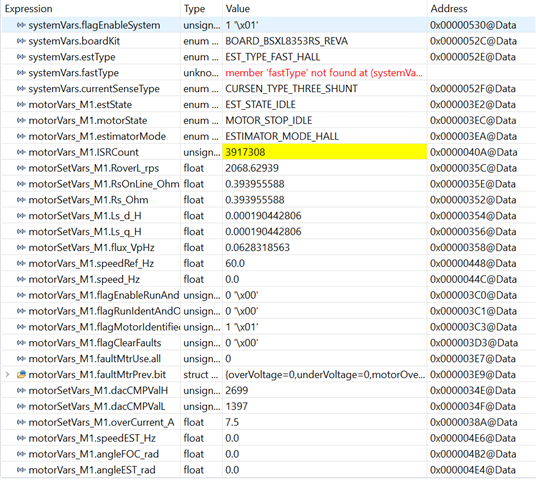
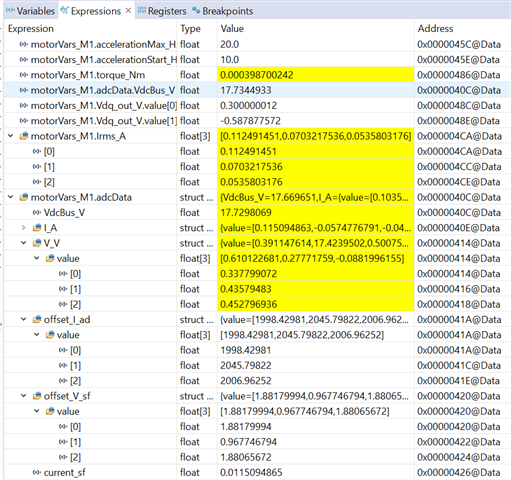
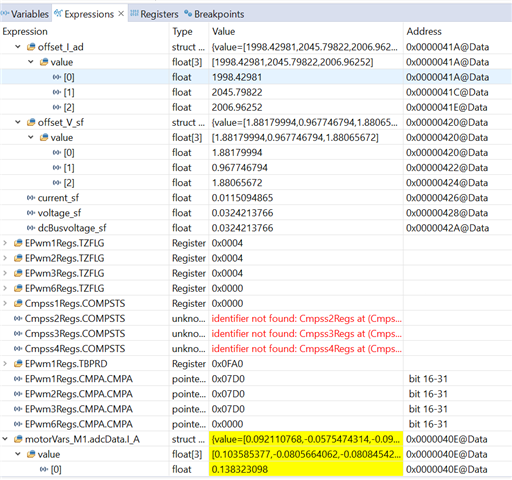
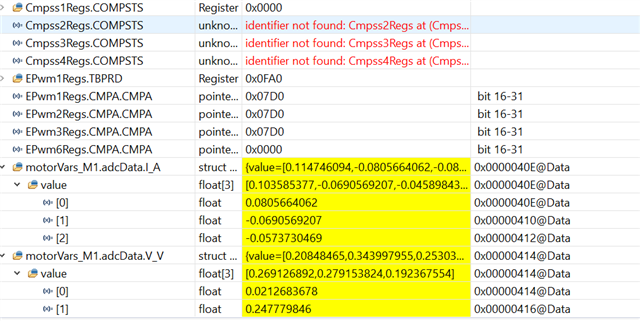
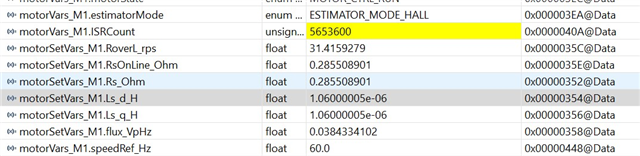
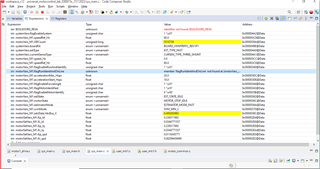
输入总线电压:24V。 但它不会读取输入总线电压。 在 motorVars_M1.adcData.VdcBus_V 变量上
您能帮助我们理解我们缺少什么吗?
非常感谢任何帮助。 提前感谢。
谢谢。此致、
T.Premkumar.