请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TMS320F28075 主题中讨论的其他器件:C2000WARE、 SysConfig
大家好!
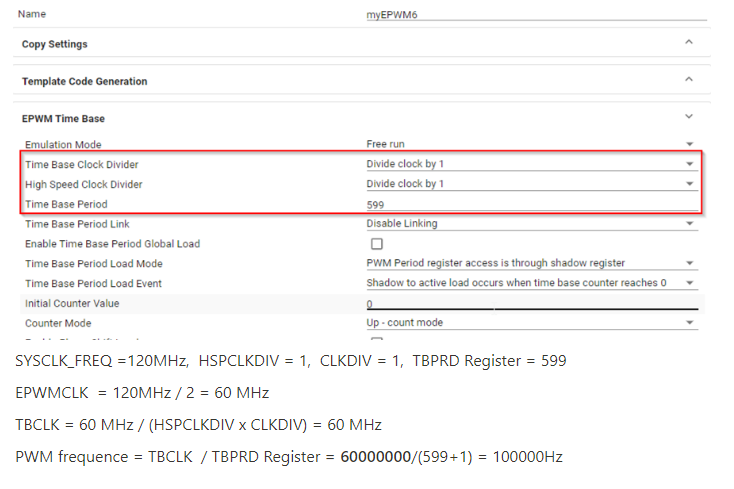
在我们的设计中、EPWMCLK 为60MHz、并且我们有100KHz ePWM 频率输出。
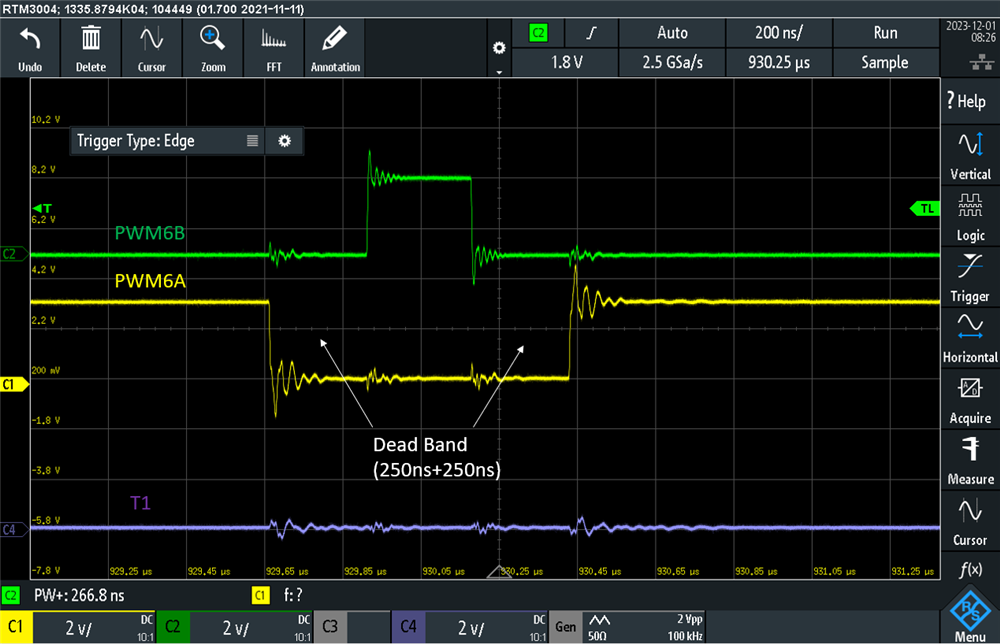
我将使用 T1事件来减小 AQ 模块中的 EPWM 占空比。 T1事件来自 CMPSS→CTRIPH→X-BAR→ePWM DC 模块→DCAEVT1。
我已禁用 SYNC 模式。
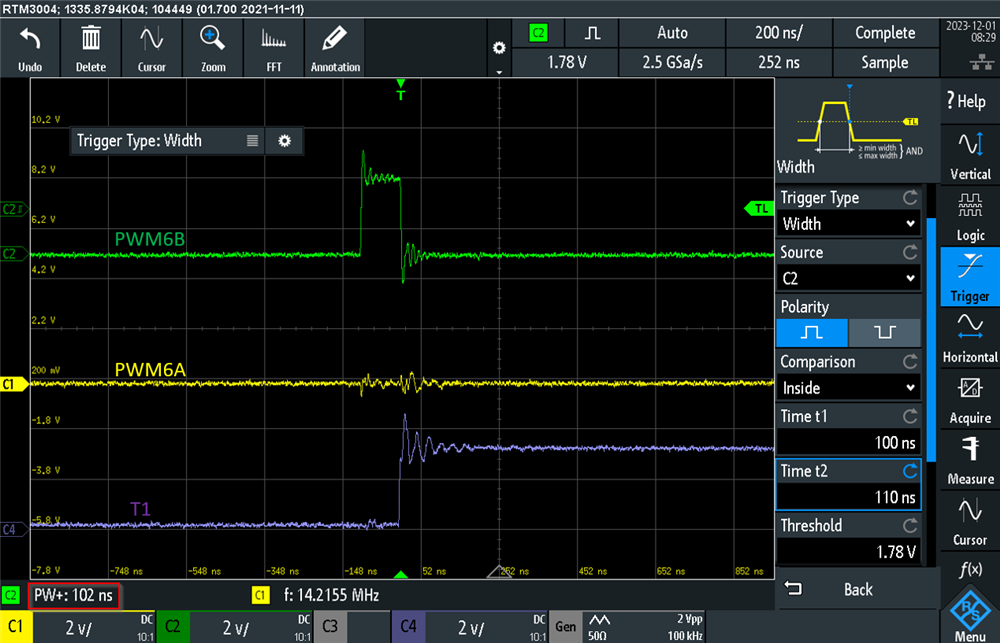
我可以减小 ePWM 占空比、但我始终得到16ns 的阶跃来降低占空比。
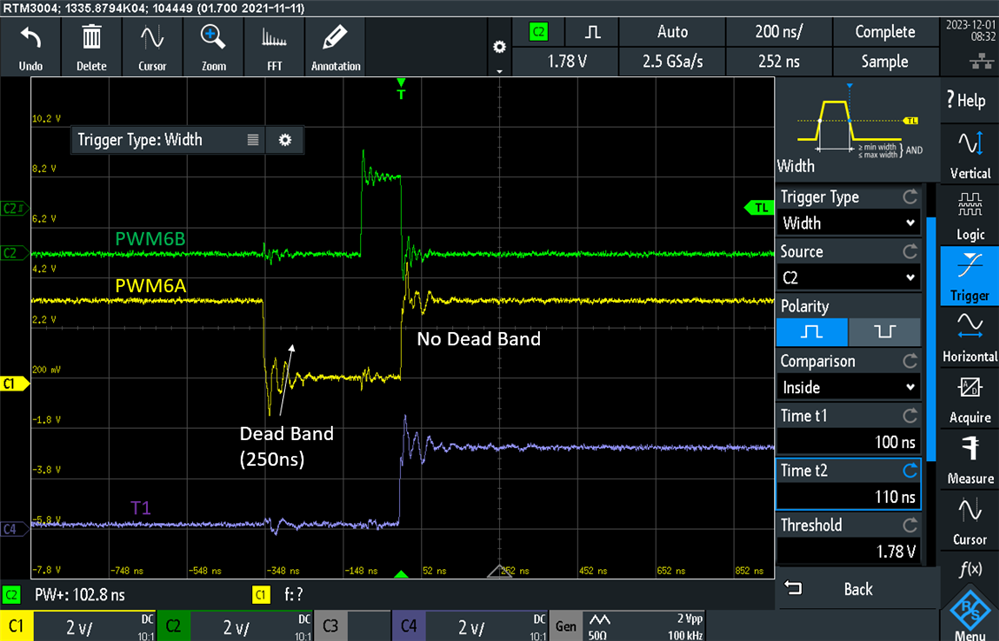
例如,我已经用100ns 加宽减小了 PWM 占空比,然后我将 T1信号移动到前面的4ns,我仍然得到100ns 加宽。 它不能缩减到宽度等于96 ns。
如果我将比较信号提前16ns、我可以获得一个84ns 的 PWM+。 是否有可能改进它?