请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TMS320F280025C 主题中讨论的其他器件:C2000WARE、 UNIFLASH
您好!
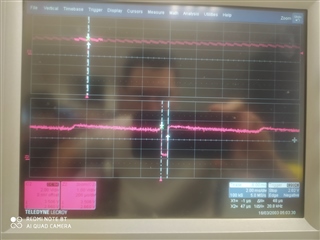
看门狗复位有问题、已将其配置为触发目标复位。 在初始化阶段、我打开和关闭一个 Led、以可视化方式显示我在此阶段的通道。 重置时间设为419ms。 我还为我的应用程序配置了 ADC 中断、但当我没有将计数器复位时、我可以看到 RST 引脚变为0、这证明复位已发生(50µs 处于低电平状态的持续时间)。 然而,我不重新访问我的初始化 tootgle led ,所以重新启动不起作用。 因此、我缺少一种理解元素。 可以帮帮我吗?
在另一个测试阶段,当我使用 ServiceDog ()函数重置主循环中的计数器时,我只执行一次中断,但仍然在主循环中停止。 计数器会使 WDCNTR 递增、并在 servicedog 函数更新 WDKEY 寄存器时复位为0。 这也很奇怪。 问题出在哪呢?
在这里、我的
void init_watchdog(void)
{
// Reset the watchdog counter
ServiceDog();
// Configure timings to set reset for software watchdog, PREDIVCLK = INTOSC1 / Pre-divider and WDCLK = PREDIVCLK / Prescaler
// With INTOSC1 = 10 MHz, WDCLK = 2441.4 / 4 = 610.35 Hz, 1 tick -> 1/610.35 = 1.638ms and counter is on 8 bits so 256 ticks -> 419 ms
// XRS pin is low for 512 OSCCLK cycles so 512 * (1 / 10.10^6) = 51µs
// Pre-divider = 4096
EALLOW;
//WdRegs.WDCR.bit.WDCHK = 0x5
//WdRegs.WDCR.bit.WDPRECLKDIV = 0x3
// Prescaler = 4
//WdRegs.WDCR.bit.WDPS = 0x3
WdRegs.WDCR.all = 0x032B;
// Counter expiration triggers a reset, this is the default state on the power-up and after any system reset.
// Write to the whole SCSR register to avoid clearing WDOVERRIDE bit
WdRegs.SCSR.all = 0;
EDIS;
}
#pragma CODE_SECTION(adc_isr, ".TI.ramfunc");
__interrupt void adc_isr()
{
EALLOW;
// Clear INT1 flag.
AdccRegs.ADCINTFLGCLR.bit.ADCINT1 = 1;
// Check if overflow has occurred.
if(AdccRegs.ADCINTOVF.bit.ADCINT1 == 1)
{
// Clear INT1 overflow flag
AdccRegs.ADCINTOVFCLR.bit.ADCINT1 = 1;
// Clear INT1 flag
AdccRegs.ADCINTFLGCLR.bit.ADCINT1 = 1;
}
// Acknowledge PIE group 1 to receive more interrupts from this group.
PieCtrlRegs.PIEACK.bit.ACK1 = 1;
EDIS;
} 代码: int main(void)
{
// PLL initialization and load the code in flash memory by the pre defined symbols include in Project -> Properties -> Pre defined symbols _FLASH to execute the flash initialization.\n
// MemCpy to copy the code in RAM.
InitSysCtrl();
// Read reset cause register to know which reset is the cause (external or software watchdog)
if(CpuSysRegs.RESC.bit.WDRSn == true)
{
// Indicates reset cause : software
reset_status = 1;
// Reset flag in cause register
CpuSysRegs.RESCCLR.bit.WDRSn = true;
}
else if(CpuSysRegs.RESC.bit.XRSn == true)
{
// Indicates reset cause : external watchdog
reset_status = 2;
// Reset flag in cause register
CpuSysRegs.RESCCLR.bit.XRSn = true;
}
// GPIO initialization
gpio_init();
GpioCtrlRegs.GPAPUD.bit.GPIO8 = 1; // Disable the pullup on GPIO8
GpioCtrlRegs.GPADIR.bit.GPIO8 = 1; // GPIO8 = output
GpioCtrlRegs.GPAODR.bit.GPIO8 = 0; // Normal output not open drain
GpioCtrlRegs.GPAQSEL1.bit.GPIO8 = 0; // Synchronous
GpioCtrlRegs.GPAMUX1.bit.GPIO8 = 0; // GPIO8 = GPIO8
GpioDataRegs.GPASET.bit.GPIO8 = 0; // Force output data latch to high level.
GpioDataRegs.GPADAT.bit.GPIO8 = 0; // Set output value
GpioDataRegs.GPADAT.bit.GPIO8 = 1; // Set output value
DELAY_US(2000000);
GpioDataRegs.GPADAT.bit.GPIO8 = 0; // Set output value
// Disable CPU interrupts.
DINT;
// Initialize the PIE control registers to their default value.
InitPieCtrl();
// Disable CPU interrupts and clear all cPU interrupt flags.
IER = 0x0000;
IFR = 0x0000;
// Initialize the PIE vectors table with pointers to the shell Interrupt Service Routine.
InitPieVectTable();
// Authorize register access.
EALLOW;
// Mapping adc_isr function to ADCC_I NT interrupt.
PieVectTable.ADCC1_INT = &adc_isr;
// Lock register access.
EDIS;
// Authorize register access.
EALLOW;
// Mapping tripzone_isr function to EPWM1_TZ_INT interrupt.
PieVectTable.EPWM1_TZ_INT = &tripzone_isr;
// Lock register access.
EDIS;
// Enable group 1 interrupts for ADCC interrupt and WAKE interrupt.
IER |= M_INT1;
// Enable group2 interrupts for trip zone interrupt.
IER |= M_INT2;
// Enable the PIE block
PieCtrlRegs.PIECTRL.bit.ENPIE = 1;
// Enable PIE interrupt 1.3 for ADCC1 interrupt.
PieCtrlRegs.PIEIER1.bit.INTx3 = 1;
// Enable PIE interrupt 2.1 for EPWM1 trip zone interrupt.
PieCtrlRegs.PIEIER2.bit.INTx1 = 1;
// Read master/slave configuration pin to initialize PWM correctly with phase shift equal 60° between them
if(GpioDataRegs.GPADAT.bit.GPIO12 == false)
{
uc_state_master_slave = MASTER;
// EPWM initialization function.
epwm_init_spwm_branch_u();
epwm_init_spwm_branch_v();
epwm_init_spwm_branch_w();
// Configure synchronization signal : load program to uC1 firstly because uC2 need external synchronization
epwm_synch_init();
}
else
{
uc_state_master_slave = SLAVE;
epwm_init_spwm_branch_x();
epwm_init_spwm_branch_y();
epwm_init_spwm_branch_z();
}
// Software watchdog initialization
init_watchdog();
// Analog to Digital Converter initialization.
adc_init();
// Comparator subsytem initialization.
// Fuel cell OVP and Battery OCP
cmpss1_init();
// Battery OVP and Mi_U peak current
cmpss2_init();
// Mi_W peak current
cmpss3_init();
// MI_V peak current
cmpss4_init();
// Configure trip zone for return driver (GPIOmux -> InputXbar -> Trip_zone -> Epwm_module)
tz_driver_return_init();
// CPUTimer2 is used for extern watchdog.
init_cpu_timers(&CpuTimer2Regs);
// CAN bus initialization
can_init();
// I2C bus initialization
i2c_init();
// Reset timer
CpuTimer2Regs.TCR.bit.TRB = 1;
// Enable Global interrupt INTM
EINT;
// Enable Global realtime interrupt DBGM
ERTM;
while(1)
{
// Extern watchdog (200ms)
// Toggle pin for watchdog for WDI signal on TPS3823-33Q1
level_wdi_watchdog_pin = !level_wdi_watchdog_pin;
GpioDataRegs.GPADAT.bit.GPIO25 = level_wdi_watchdog_pin;
extern_watchdog_meas.start_time = CpuTimer2Regs.TIM.all;
// Reset the watchdog counter
ServiceDog();
extern_watchdog_meas.end_time = CpuTimer2Regs.TIM.all;
// Measure main loop timing
extern_watchdog_meas.timediff = extern_watchdog_meas.start_time - extern_watchdog_meas.end_time;
// Reset timer
CpuTimer2Regs.TCR.bit.TRB = 1;
}
}
谢谢
达米恩