

Other Parts Discussed in Thread: TMS320F2800157
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TMS320F2800157 我有一个关于 LIN 模块的问题:
1:环境:
1) PC LIN 主节点
2) TMS320F2800157 LIN 从节点
3 ) PIN5 LIN 使能
引脚2 LIN-TX
引脚1 LIN-RX

2:代码
1)Macor
#define GPIO_PIN_LINA_RX 29
#define myLIN0_LINRX_GPIO 29
#define myLIN0_LINRX_PIN_CONFIG GPIO_29_LINA_RX
//
// LINA_TX - GPIO Settings
//
#define GPIO_PIN_LINA_TX 28
#define myLIN0_LINTX_GPIO 28
#define myLIN0_LINTX_PIN_CONFIG GPIO_28_LINA_TX
#define myGPIO0 242
#define myGPIO0_GPIO_PIN_CONFIG GPIO_242_GPIO242
2 ) Init -SYSCLK 120M
// GPIO242 -> myGPIO0 Pinmux
GPIO_setPinConfig(GPIO_242_GPIO242);
// AGPIO -> GPIO mode selected
GPIO_setAnalogMode(242, GPIO_ANALOG_DISABLED);
//
// LINA -> myLIN0 Pinmux
//
GPIO_setPinConfig(myLIN0_LINRX_PIN_CONFIG);
GPIO_setPadConfig(myLIN0_LINRX_GPIO, GPIO_PIN_TYPE_STD);
GPIO_setQualificationMode(myLIN0_LINRX_GPIO, GPIO_QUAL_ASYNC);
GPIO_setPinConfig(myLIN0_LINTX_PIN_CONFIG);
// AGPIO -> GPIO mode selected
GPIO_setAnalogMode(28, GPIO_ANALOG_DISABLED);
GPIO_setPadConfig(myLIN0_LINTX_GPIO, GPIO_PIN_TYPE_STD);
GPIO_setQualificationMode(myLIN0_LINTX_GPIO, GPIO_QUAL_ASYNC);
LIN_initModule(myLIN0_BASE);
//
// Enter Software Reset State
//
LIN_enterSoftwareReset(myLIN0_BASE);
LIN_setLINMode(myLIN0_BASE, LIN_MODE_LIN_RESPONDER);
LIN_setCommMode(myLIN0_BASE, LIN_COMM_LIN_USELENGTHVAL);
LIN_setDebugSuspendMode(myLIN0_BASE, LIN_DEBUG_COMPLETE);
LIN_setChecksumType(myLIN0_BASE, LIN_CHECKSUM_ENHANCED);
LIN_setMessageFiltering(myLIN0_BASE, LIN_MSG_FILTER_IDRESPONDER);
LIN_enableParity(myLIN0_BASE);
//
// Finally exit SW reset and enter LIN ready state
//
LIN_exitSoftwareReset(myLIN0_BASE);
//
// Enable LIN Interrupts
//
LIN_enableInterrupt(myLIN0_BASE, LIN_INT_ID| LIN_INT_RX);
//
// Set the interrupt priority line
//
LIN_setInterruptLevel0(myLIN0_BASE, LIN_INT_ID| LIN_INT_RX);
LIN_enableGlobalInterrupt(myLIN0_BASE, LIN_INTERRUPT_LINE0);
LIN_clearGlobalInterruptStatus(myLIN0_BASE, LIN_INTERRUPT_LINE0);
GPIO_writePin(myGPIO0, 1);
Interrupt_register(INT_LINA_0, &level0ISR);
Interrupt_enable(INT_LINA_0);
LIN_setBaudRatePrescaler(LINA_BASE, 389U, 10U);
3 ) Interrupt Function
uint32_t i, dataIndex;
uint16_t txID,rxID,rxID2, error;
#define FRAME_LENGTH 0x8
#define LIN_PASS 0xABCD
#define LIN_FAIL 0xFFFF
volatile uint32_t level0Count = 0;
volatile uint32_t level1Count = 0;
volatile uint32_t vectorOffset = 0;
uint16_t result;
uint16_t txData[8] = {0x11, 0x34, 0x56, 0x78, 0x9A, 0xAB, 0xCD, 0xEF};
uint16_t txData2[8] = {0xAA, 0xAA, 0xAA, 0xAA, 0xAA, 0xAA, 0xAA, 0xAA};
uint16_t rxData[8] = {0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF};
__interrupt void
level0ISR(void)
{
//
// Increment the interrupt count
//
level0Count++;
rxID = LIN_getRxIdentifier(LINA_BASE)& 0x3F;
if(rxID== 0x2)
{
LIN_setFrameLength(LINA_BASE, 8);
if(LIN_isRxReady(LINA_BASE) == 1)
{
LIN_getData(LINA_BASE, rxData);
}
}
else if(rxID == 0x3)
{
if(LIN_isTxReady(LINA_BASE) ==1)
{
LIN_setFrameLength(LINA_BASE, 8);
LIN_sendData(LINA_BASE, txData);
}
}
else if(rxID == 0x4)
{
if(LIN_isTxReady(LINA_BASE) ==1)
{
LIN_setFrameLength(LINA_BASE, 8);
LIN_sendData(LINA_BASE, txData2);
}
}
else if(rxID == 0x15)
{
i++;
}
//
// Read the high priority interrupt vector
//
vectorOffset = LIN_getInterruptLine0Offset(LINA_BASE);
//LIN_clearInterruptStatus(LINA_BASE, LIN_INT_ID | LIN_INT_OE |LIN_INT_FE );
LIN_clearInterruptStatus(LINA_BASE,LIN_INT_ALL);
LIN_clearGlobalInterruptStatus(LINA_BASE, LIN_INTERRUPT_LINE0);
//
// Acknowledge this interrupt located in group 6
//
Interrupt_clearACKGroup(INTERRUPT_ACK_GROUP6);
}
3:当前代码运行的结果
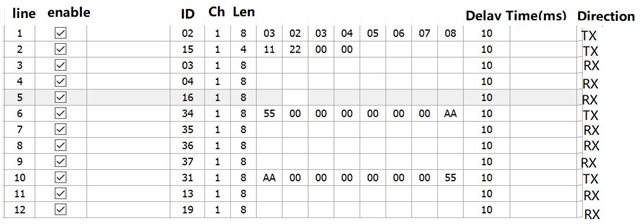
我的 LIN 计划表
我的例外结果
IC 接收 02 -03 02 03 04 05 06 07 08 -20ms
IC 传输03-11 34 56 78 9A AB CD EF -10ms
IC 传输04 - AA AA AA AA AA AA AA AA AA AA AA AA AA-90ms
我的实际结果

Q1 : 基于头0x03和0x04回复消息,实际结果是头0x04后跟消息错误,头0x16跟0x04要发送消息,解决它的方法是什么?
Q2:如何修改代码配置以实现通过单个中断发送和接收 LIN 数据的功能?
