请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TMS320F28P650DK 主题中讨论的其他器件:DRV8353RS-EVM、SFRA、 LAUNCHXL-F28P65X
您好!
我正在使用通用电机控制实验室项目、其中包含 f28p65x LaunchPad 和 DRV8353RS-EVM 板。
我按照 SPRUJ26用户指南的说明进行操作、
我已将 DMC_Level1传递到 DMC_Level3、未出现任何问题。
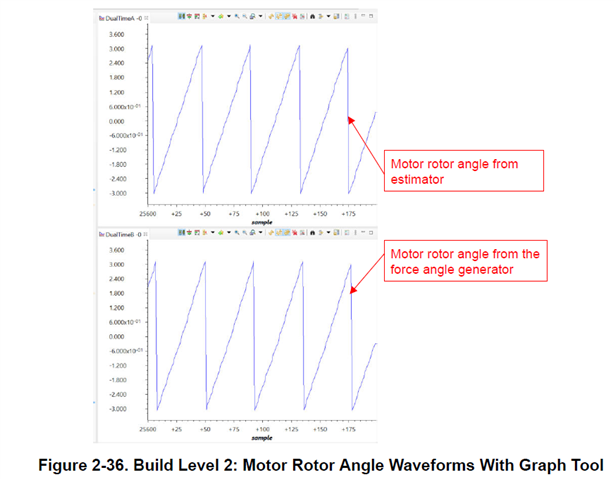
在 DMC_LEVEL4 (9.b. SPRUJ26的第84页)、我有两个问题。
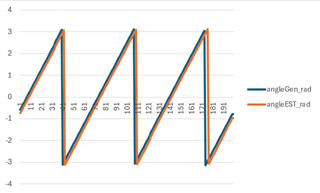
第一个是有一个启动完成的标志、这意味着我无法使用我的电机达到冷启动环路速度控制、而转子继续以非常低的速度旋转。
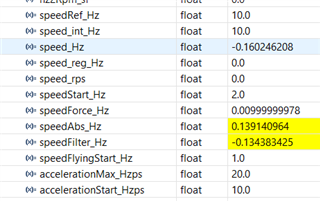
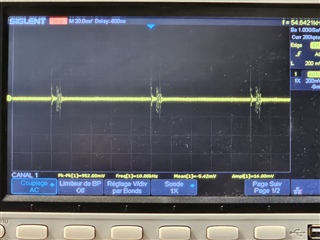
第二个原因是、当转子持续以极低的速度旋转时、我可以读取的速度值(SPEED_Hz = 0.008 => 0.48rpm)与物理速度(2rpm)之间的换算系数约为4。
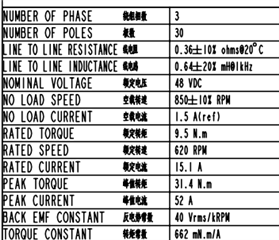
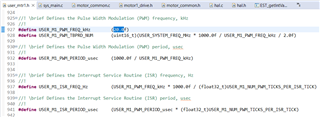
我认为我的电机参数(在 user_mtr1.h 中)存在问题。
您是否有详细介绍如何正确设置电机参数以及如何调节控制器的用户指南?
提前非常感谢您的帮助。
大卫