请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TMS320F28379S 工具与软件:
你(们)好
我正在寻求有关如何解决恒流控制中的重大误差的建议。
通过使用外部精密仪器获取偏移和增益值来测试电流校准。
H/W 配置
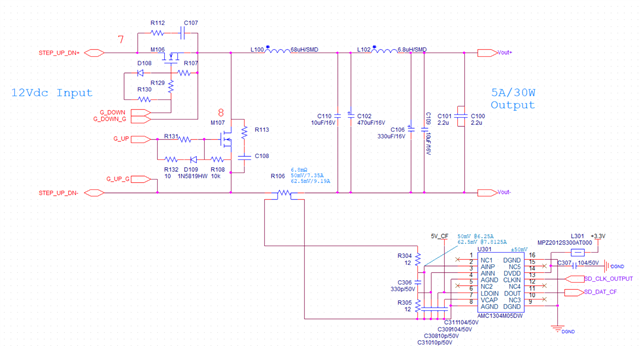
- 拓扑:降压非隔离式直流/直流
- DSP:TMS320F28379S
- ADC:SDFM + AMC1304M05DW
- PWM:50kHz
- 中断:每50kHz 发生一次
EPwm11设置
EPwm11Regs.TBPRD = 1999;
EPwm11Regs.CMPC = 39;
EPwm11Regs.CMPA.bit.CMPA = 1969;
峰值
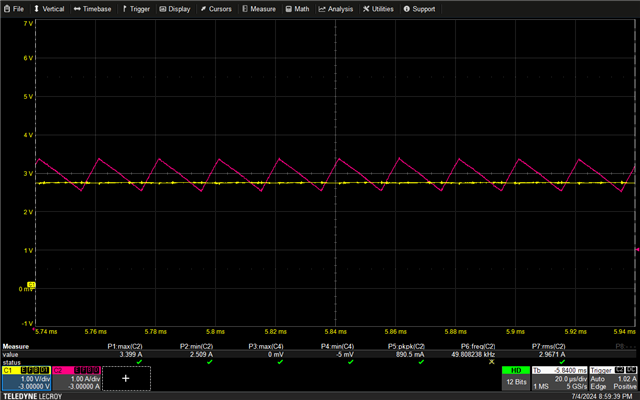
- 当设置为3.000A 时、该误差很大、导致电流约为2.913A。
- 即使对于相同的电流(例如3A)、输出电流值的误差也会在 CC 控制状态下随输出电压而变化(占空比变化)。
当分流电阻器的位置移至最终输出时、CC 控制无效。
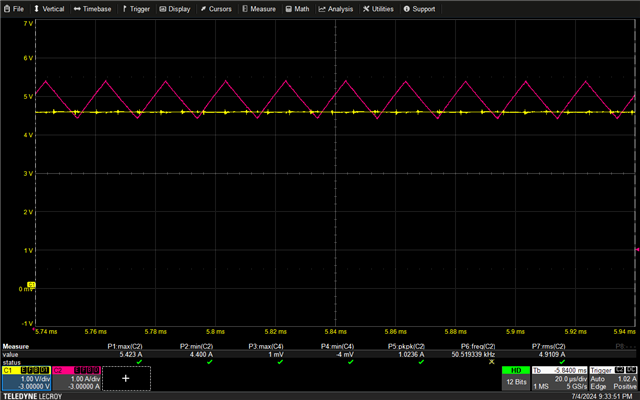
比较
3A 电感器电流图
5A 电感器电流图
您能提供有关实现精确 CC 控制的任何方法的建议吗? 祝你度过美好的一天!