Other Parts Discussed in Thread: TMDSCNCD28P65X, TMS320F280049C, C2000WARE
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TMS320F28P659DK-Q1 主题中讨论的其他器件:TMDSCNCD28P65X、 TMS320F280049C、 C2000WARE
工具与软件:
您好!
我正在尝试示例 HRPWM_ex3_prdupdown_fo、该示例与我们正在研究的项目(我们正在使用 HRPWM 来对 LLC 进行变频控制)类似。
我修改了此示例、以在调试中更改"count"变量的小数部分。 另一个不同之处在于、对开发板(TMDSCNCD28P65X controlCARD)进行了修改、以选择20MHz 作为时钟源。
运行该示例的情况如下:
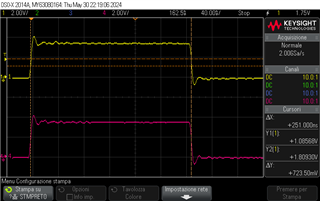
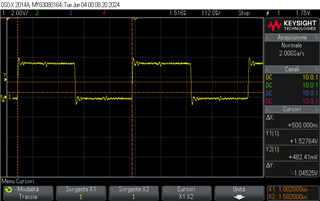
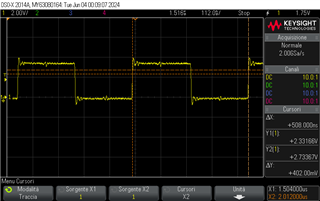
对于变量"periodFineCustom"的某些值(对于某些 TBPRDHR 值)、我在 PWM 上看到了抖动。 我附上了一个示波器屏幕(EPWM1A:黄色、EPWM1B:粉色)和一个相应调试视图的屏幕(还可以在其中看到代码修改)。
说实话、我还看了这篇文章:"TMS320F280049C:使用 HRPWM 周期控制时抖动"、我尝试了项目中所述的建议、但抖动仍然存在。 然后我尝试了上面所述的示例、并再次出现抖动。
您认为根本原因是什么?


提前感谢您、
Simone