Other Parts Discussed in Thread: DRV8353
主题中讨论的其他器件:DRV8353
工具与软件:
团队成员、您好!
在开发定制电路板的过程中、我们使用 DRV8353和 f2800157 Launchpad 对定制电路板进行了测试、以确保电机在移至定制电路板之前可以正常工作。
在我们的定制电路板中、我们不使用 DRV8353栅极驱动器 IC、而是使用基于光耦合器的栅极驱动器。我们使用的是容量相同的 IC、这已经得到了48V 电机在负载条件下运行的证明。
我有定子电阻、电感、额定磁通、惯性和反电动势等电机电气参数、并在通用电机代码(UMC)中复制了相同的参数。
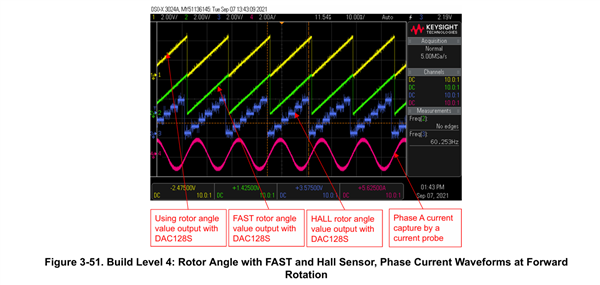
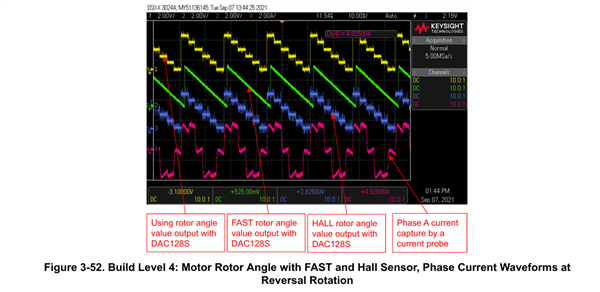
目前、我在 MOTOR1_HALL 中使用 LEVEL_4运行48V 霍尔电机。
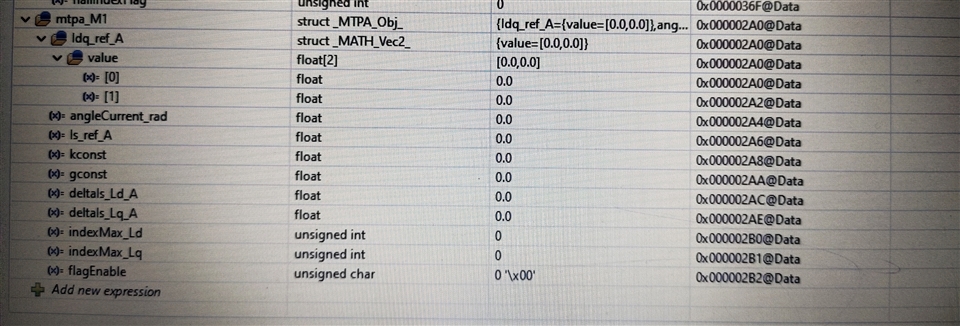
我在 UMC 中维护以下参数。
USER_M1_NOMINAL_DC_BUS_VOLTAGE_V (48.0f)
USER_M1_ADC_FULL_SCALE_VOLTAGE_V (250.658)
USER_M1_VOLTAGE_FILTER_POLE_Hz (375.1100618f)
USER_M1_ADC_FULL_SCALE_CURRENT_A (47.14285714f)
Kp_Id 和 Kp_Iq = 0.12488495
Ki_Id 和 Ki_Iq = 0.001312
Kp_spd = 0.224244887
KI_SPD = 0.00224244887
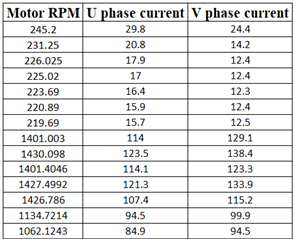
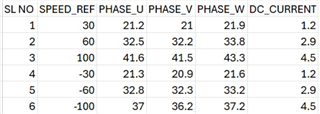
1.我们正在进行相位调整、如电机相电流不同、低于此电流、我在负载条件下以 SPEED_ref = 100F 运行时提到了全相电流。
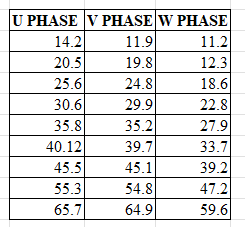
我已经 针对上述问题调整了 USER_M1_VOLTAGE_FILTER_POLE_Hz、Kp_Id 和 Kp_Iq 值、但仍无法解决。
我已经检查了现有系统在负载条件下的这个相电流问题、现在 所有相位上的电流消耗几乎相同、相位之间只有1A 的差异、但在我们的系统中、当我们增加负载时、相位之间的差异大于15A。
请建议我们需要校准哪些参数来解决此问题。
此致、
Kirana H P