

请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TMS320F28069M 主题中讨论的其他器件:DRV8353、 MOTORWARE、 LAUNCHXL-F28069M、DRV8353RS-EVM
工具与软件:
使用 TM3200F28069M 套件板和 DRV8353RH 套件来执行电机运行测试。
我们首先使用 Lab1b 来启用开环运行。 电机配有分辨率为1024ppr 的位置传感器和 QA.QB.Index 信号输出。
我们查询实验12a 的相应 TI 实验室示例程序。
的 include HAL 文件是 drv8353的 hal.c 和 drv8353.c。
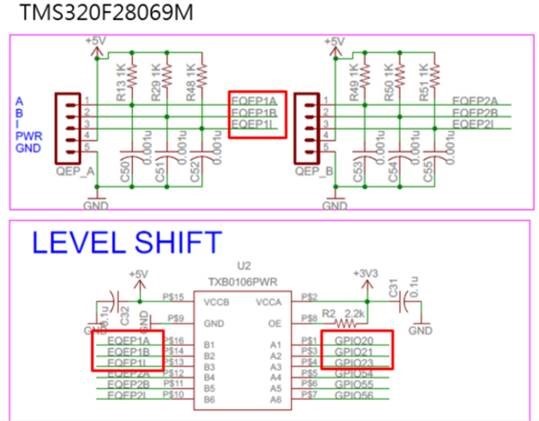
我们还确认了 PWM、GPIO、ADC 和 QEP 发布的 GPIO 编号引脚。
已使用 尝试的 FAE 和 R&D 参数调整电机参数。
根据每个 PDF 文件的规格更改值。 程序接收编码器信号并计算转子位置。
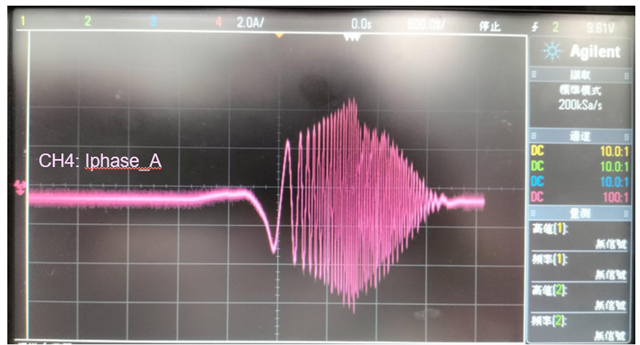
运行实验12a 程序可以启动、但电机很快停止、错误消息为 gMotorVars.SpinTAC.VelIdErrorID 2003。
如果您有任何问题、请提问:
1.电机使用位置传感器编码器。 相应的示例程序是否为 Lab 12a? 可以正常驱动哪一个?
2.实验12a 示例程序是否使用启动位置传感器? 我们如何进行调节、以便全部使用位置传感器运行、而不是无传感器运行?
请帮助解决上述问题、谢谢。

