主题中讨论的其他器件:SysConfig、 TMDXIDDK379D、DESIGNDRIVE
工具与软件:
您好、TI:
我将为 PMSM 构建一个20kW 逆变器、必须对其进行测试。 现在、我要查找 MCU 和控制软件。
电机:ME1507 IPM
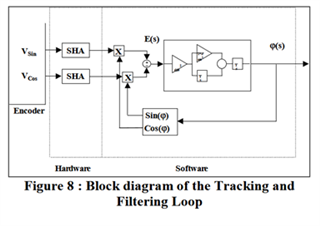
编码器:无索引的正弦/余弦
Vmax = 50-70V
Imax = 300A
我曾多次使用 Instaspin 和 F28069。 我认为、最简单的方法是使用此 MCU、为正弦/余弦编码器制作硬件、然后添加正弦/余弦库。
但是、如果我想使用新型 MCU (如 F28P65、F28388D、或者可能是 F280039c)、您建议的起点是什么? 我只需要有传感器的 FOC (最好还提供无传感器功能)。 在本例中、我还想将 PoshBerry 用于 sin/cos 接口。
这就是我对于 F28P65的发现、我更喜欢将其作为 MCU:
1. tidm_02017_2w_traction_inverter。 代码看起来很清晰、但我没有找到任何与代码相关的 mor 确切文档。 有吗? 此代码是否正常工作? 在这里、我要使用 SysConfig 工具添加 POSMGR 初始化?
2. tida_010936_ganhfmd、tmdxiddk379d 和 servo_drive_with_can 是基于 DesignDrive 的。 我从未使用过 DesignDrive、这有多难? 我会在源代码中添加 POSMGR 初始化?
另一种方法是使用 Matlab 或 Plecs。 对于 Matlab 我找到了这个示例、即"Generate Motor Control Models for Selected Algorithms and Hardware"。 我曾经使用过 Matlab、但从未使用过 C2000 Blockset。 是否可以在此示例中添加带 Sin/Cos 接口的 POSMGR? 我找到了 F280049c 和用于 Matlab 的 POSMGR 的示例。 对于 F28p65、它是否也很容易实现?
目前这仅用于测试逆变器、稍后将进行可靠的实现。
任何建议都很好、此致、
Daniel