请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:LMX2492 主题中讨论的其他器件: LMX2594、
您好!
我们正在考虑 将 LMX2492用于我们的其中一个项目。 我们有以下问题:
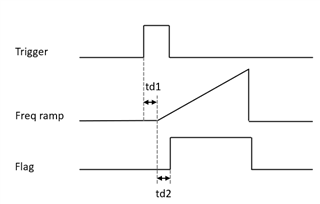
- 是否有时域模型用于评估趋稳行为?
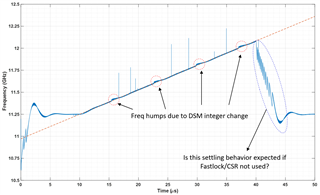
- 如果不使用快速锁定和周期打滑减小功能(考虑设计中已使用的最大 ICP)、与传统分数 N PLL 相比、是否有用于改善趋稳行为(尤其是周期打滑)的内部技术(请查看下图)?
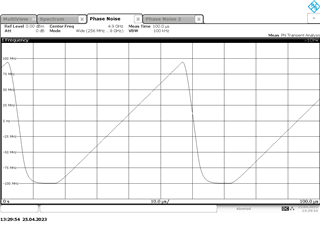
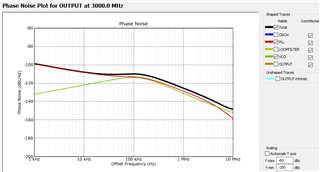
- 我们注意到 LMX2492的带内噪声(平坦和闪烁)比其他 TI PLL 差得多(例如、与 LMX2594相比、9dB 以下:-227与-236和-120与-129)
- LMX2492在设计上是否更糟糕?
- 对噪声进行表征的测试条件是什么?
- 与稳定状态下的静态 PLL 相比、FMCW 调制下 PLL 的带内噪声会增加、因为电荷泵活动会增加
- 数据表中报告的闪烁和平坦噪声是否考虑了这一点?
- 如果需要、则假设了哪些 FMCW 条件(线性调频脉冲速率等)?
- 如果没有、那么在 LMX2492处于特定调制下时、我们应该预期下降多少?
- 数据表中报告的闪烁和平坦噪声是否考虑了这一点?
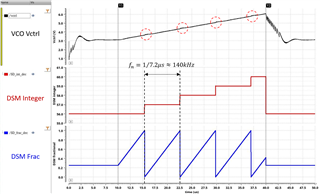
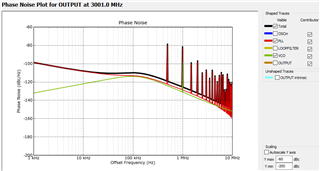
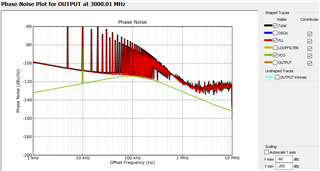
- 对于我们的项目、当 PLL 低于 FMCW 时、反馈分频器的整数和小数部分都需要变化。 对于某些 DSM 实现、我们注意到、如果整数部分变化、会导致频率斜坡曲线中的频率峰值、从而产生杂散雷达输出(请查看下图)。
- LMX2492中是否需要这些峰值?
- 设计中使用了哪些技术来缓解这种情况?