请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:MSP432P401R Thread 中讨论的其他器件:SYSBIOS
工具/软件:Code Composer Studio
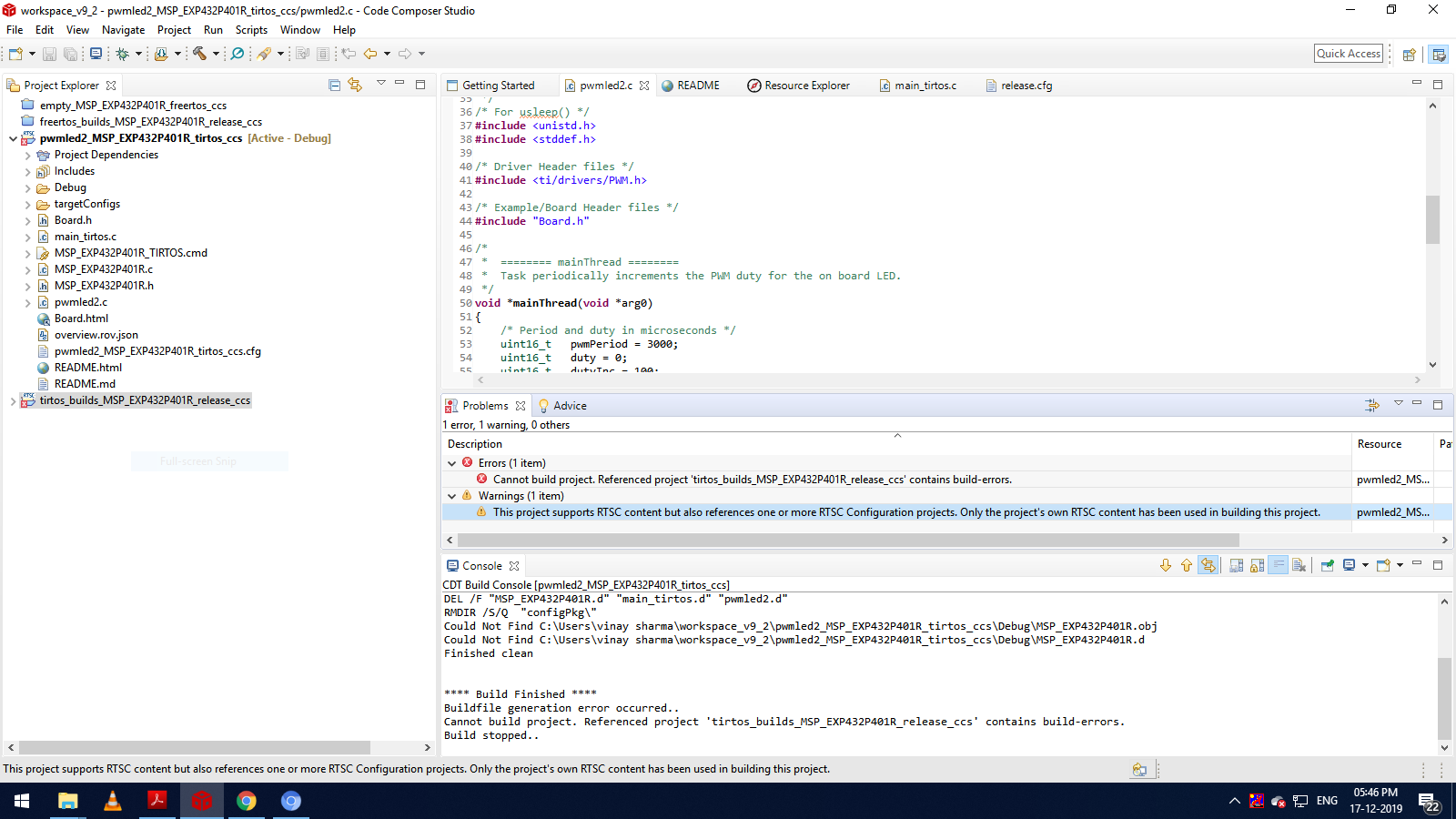
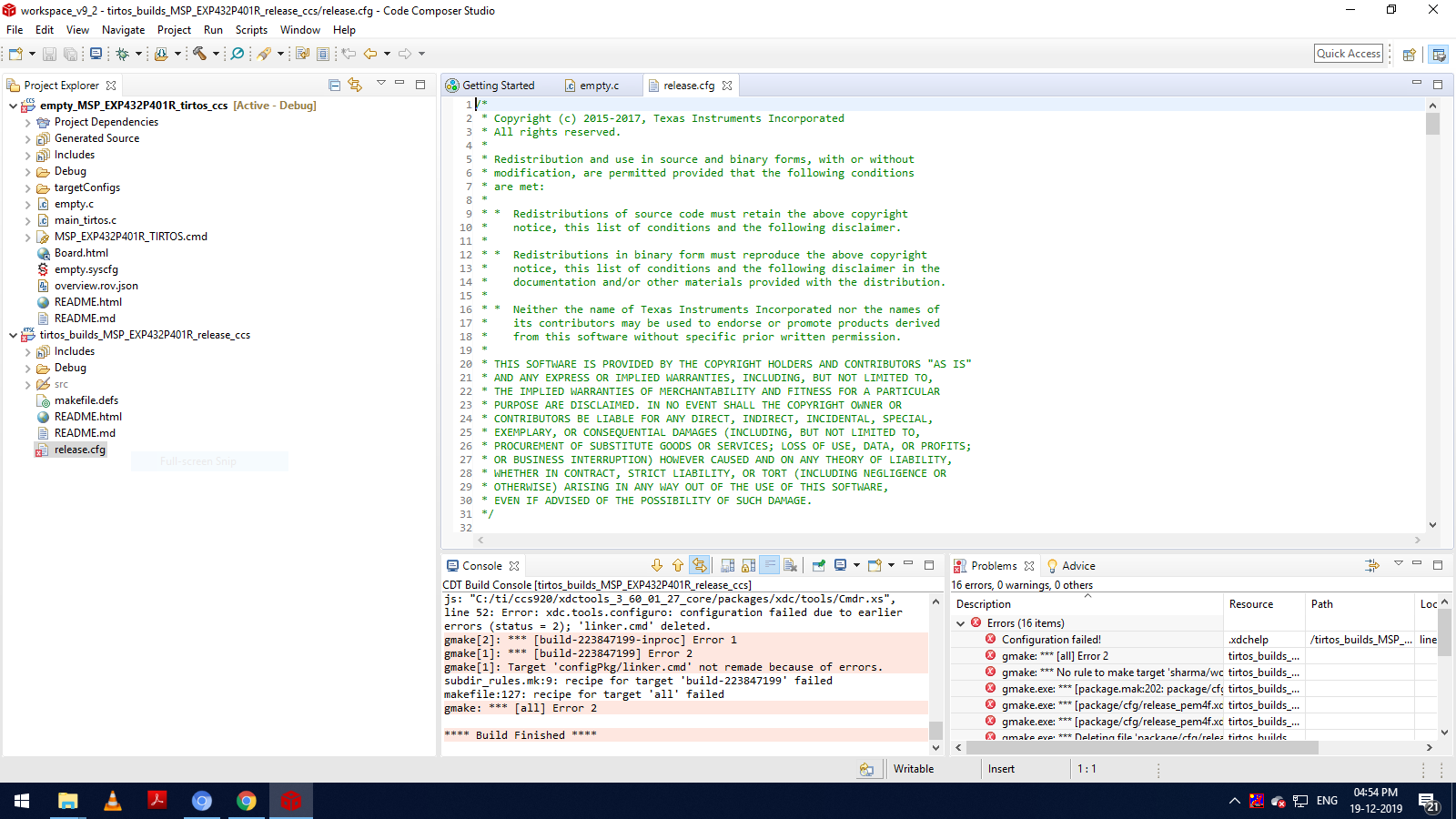
大家好、我叫 Vinay Sharma、现在正在 CCS 中学习编程。 我有 CCS 9_2版本和 SDK 2_30_00_14版本、但在我的计算机中存在问题。当我尝试调试 SDK 代码而不是生成此图像中显示的错误消息时、我将在出现此问题后发生什么、我可以在 show 中编辑我的要求 所有 SDK 文件