请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:CCStudio Thread 中讨论的其他器件:AM3359、 SYSBIOS
工具/软件:Code Composer Studio
尊敬的所有人:
我正在 CCS 中开发一种数据转换方法、并且面临以下问题。
给定:包含 typedef 结构和 char*变量的头文件。
要求:从头文件中读取这些变量的值。
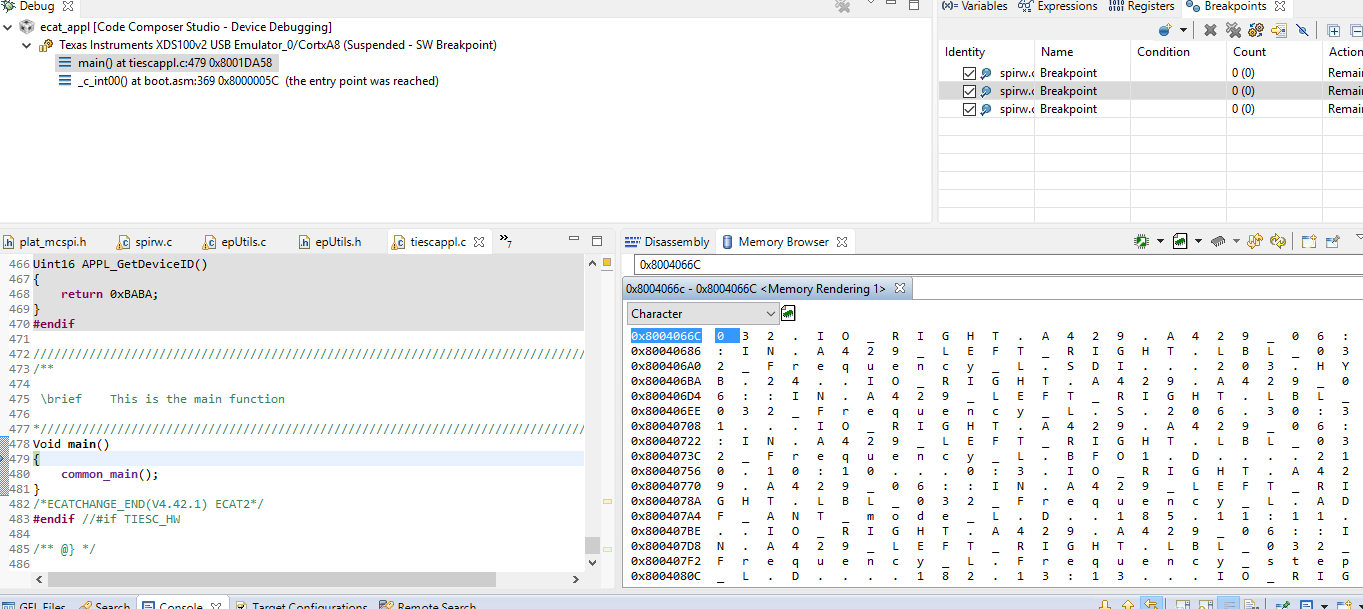
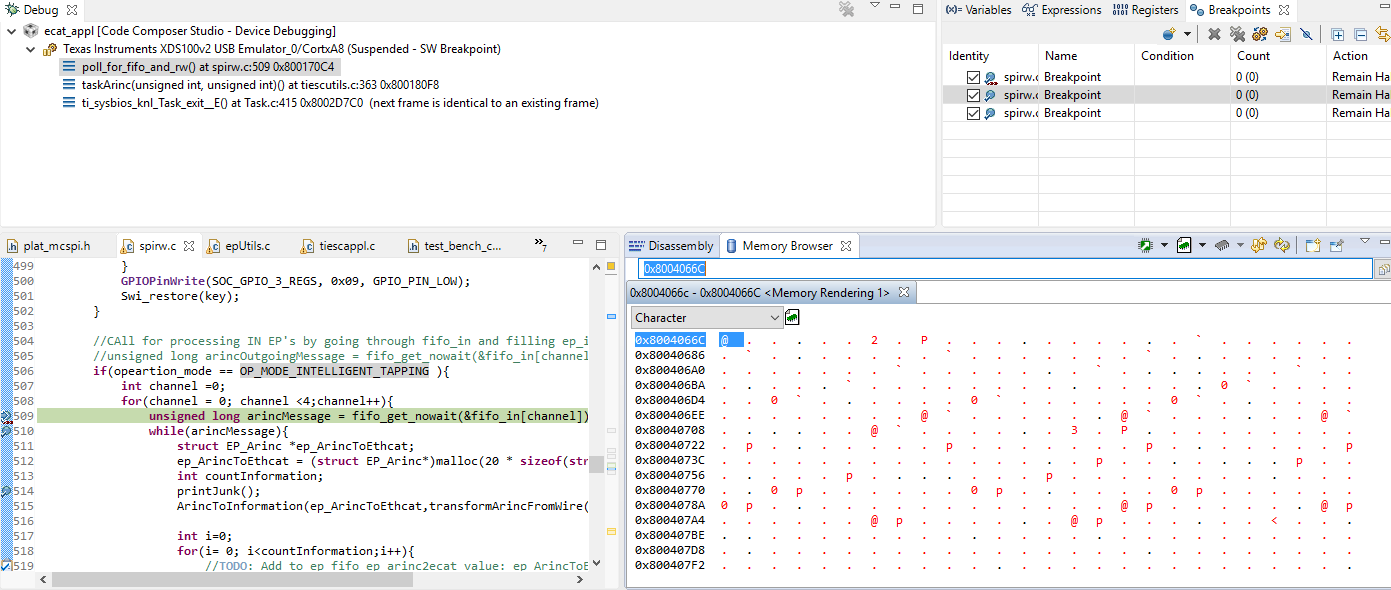
问题:从变量中读取的某些值与头文件中的值不同,但似乎是某种垃圾。 例如、 符号"@"、"^8DH0L|***"、"ÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿ"
根据我的观察、存储在存储器浏览器中的值是错误的、因此读取的值是意外的。
例如、
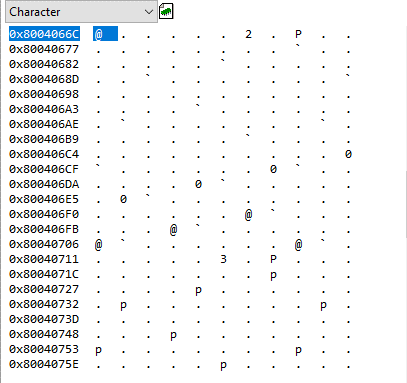
在头文件中,变量 char * label_id_attr 的值为“032”,但内存浏览器中的值为“@”
内存浏览器的屏幕截图:
在另一个点、变量中存储在不同结构中的值、char * label_id_attr ="0354"、存储器浏览器具有相同的值。
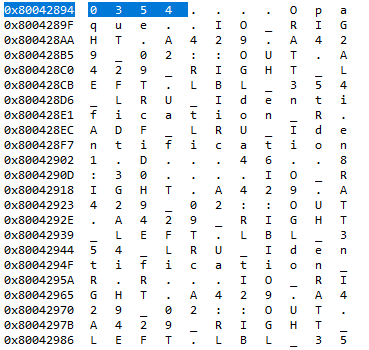
这很奇怪...
可能需要的详细信息、
头文件的文本文件编码:UTF-8
CCS 版本:6.0.1.00040
编译器版本:TL v5.1.4
系列:ARM 通用 CortexA8器件
器件:TI XDS100v2 USB Emulator_0/Cortex A8
板:ICE_AM3359 (在目标配置中)
请帮助我解决此问题、如果您需要更多详细信息、请告诉我。
谢谢、
Bhavanithya