

Other Parts Discussed in Thread: SYSCONFIG
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:LP-EM-CC1354P10 主题中讨论的其他器件:SysConfig
- CCS 版本12.3.0
- SDK 版本 simplelink_cc13xx_cc26xx_sdk_7_10_00_98
我与一位在 CCS 外部构建应用程序(不是 CCS 管理项目)的客户合作。 然后、这些连接器手动创建目标配置、并将外部应用程序(ELF 格式的*。out、使用 GCC 构建)加载到 CCS 中连接的目标。
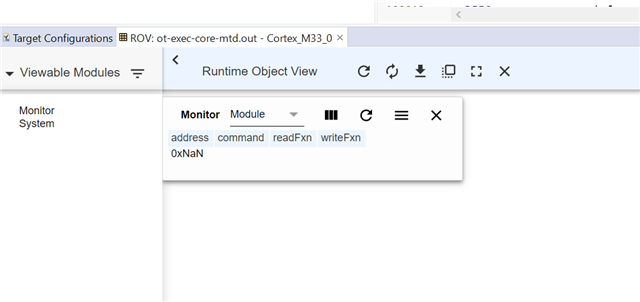
此时、它们打开了 Tools -> Runtime Object View ,只是它不会显示我们期望的所有 FreeRTOS 相关模块。 相反、它显示的就是:
外部构建的工程包含 SysConfig、并且正在生成 SysConfig_c.ROV.xs 文件。 我们随后发现了以下指令:
注意:ROV 通过检查主机上的.ROV.xs 文件来查找模块列表。 在构建 TI-RTOS 应用程序时、该文件会在应用程序配置项目树的子目录中自动生成。 如果在连接到 ROV 时指定了可执行文件的路径(而不是使用当前正在 CCS 中调试的程序)、ROV 会在包含可执行文件的同一目录和 configPkg/packages/cfg 子目录中查找.ROV.xs 文件
但是、这些指令似乎实际上并不起作用。 我们的努力没有成功。 我们缺少什么吗?
谢谢。
斯图尔特
