主题中讨论的其他部件: CC2530, ADS1298,
我使用CC2530板与ADS1299EEGFE-PDK子板连接。
我读了ChipID并得到了正确的值。
然后我 根据数据表第62页(设置基本数据采集设备)编写和阅读配置
事实上,我读 过一些以前的文章。 根据 Ivan Rock的帖子。(ADS1298:运行测试信号并使用两个电极测量心率)
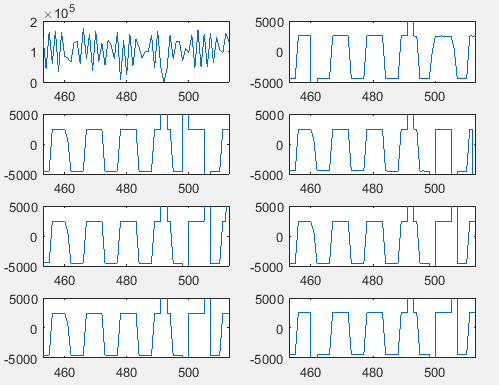
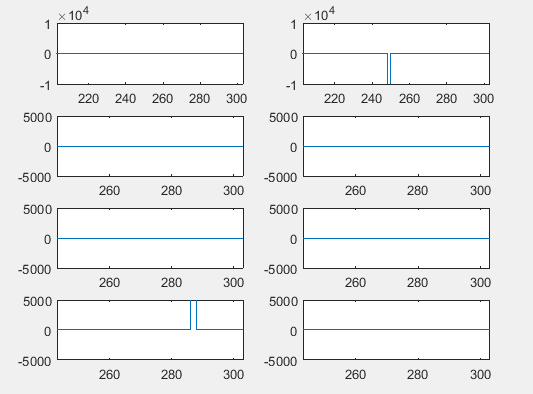
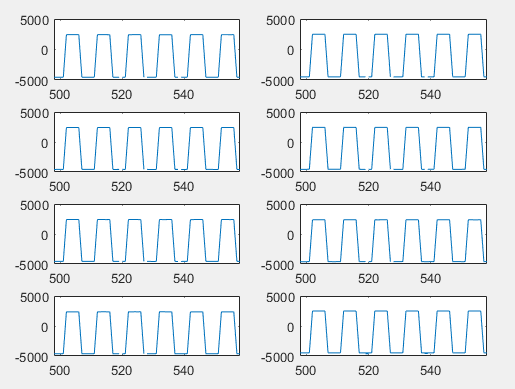
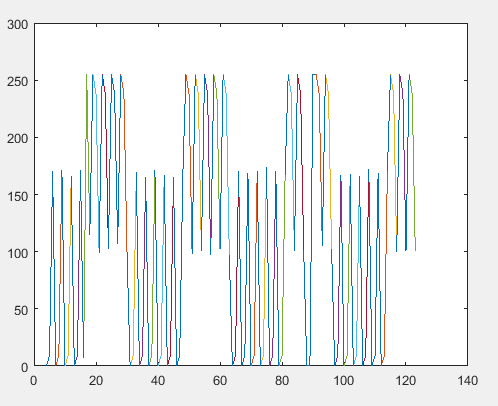
我经常从缓冲区读取27字节,并形成[n x 8]矩阵来存储信号。我使用MATLAB测试 内部 测试信号。
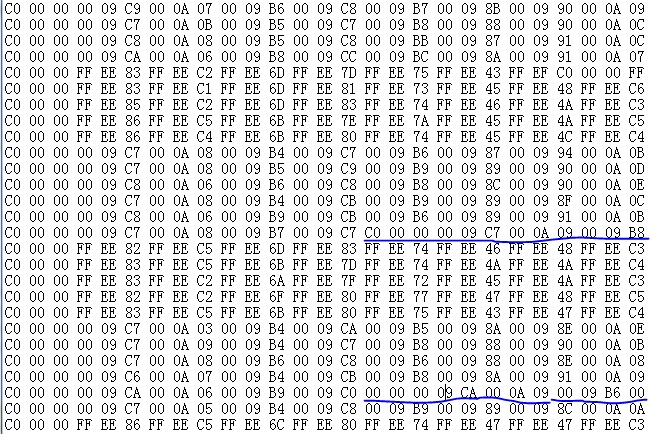
这是我的数据和一个频道的图像。 图像看起来像方波? 我错了吗?
C0 00 00 00 09 C1 00 09 FF 00 09 AF 00 09 C2 00 09 B0 00 09 83 00 09 84 00 0A 03
C0 00 00 00 09 C1 00 0B 80 00 00 00 13 86 00 13 FE 00 13 58 00 13 84 00 13 52 00
C0 00 00 00 09 C1 00 09 FF 00 09 AA 00 09 C3 00 09 AF 00 09 83 00 09 88 00 0A 06
C0 00 00 09 be 00 09 FE 00 09 AA 00 09 C0 00 09 AC 00 09 81 00 09 88 00 0A 00
C0 00 00 00 09 C0 00 09 FC 00 09 AE 00 09 C1 00 09 AD 00 09 7F 00 09 89 00 0A 03
C0 00 00 FF EE 7C FF EE BA FF EE 67 FF EE 79 FF EE 66 FF EE 3C FF EE 40 FF EE BB
C0 00 00 FF EE 7E FF EE BF EE 68 FF EE 7A FF EE 6A FF EE 3E FF EE 43 FF EE BD
C0 00 FF EE 77 FF EE BA FF EE 64 FF EE 79 FF EE 68 FF EE 3C FF EE 40 FF EE BB
C0 00 00 FF EE 7C FF EE B6 FF EE 63 FF EE 74 FF EE 67 FF EE 3B FF EE 40 FF EE BB
C0 00 FF EE 78 FF EE B9 FF EE 67 FF EE 77 FF EE 67 FF EE 3D FF EE 42 FF EE BB
C0 00 FF EE 79 FF EE BA FF EE 64 FF EE 77 FF EE 69 FF EE 3B FF EE 3C FF EE B9
C0 00 00 09 BE 00 09 FC 00 09 B1 00 09 BE 00 09 AE 00 09 81 00 09 83 00 0A 00
C0 00 00 00 09 BD 00 0A 01 00 09 AF 00 09 C1 00 09 AF 00 09 82 00 09 89 00 0A 03
C0 00 00 00 09 C0 00 0A 01 00 09 B1 00 09 C1 00 09 B1 00 09 85 00 09 87 00 0A 03
C0 00 00 00 09 C0 00 0A 01 00 09 AD 00 09 C0 00 09 AC 00 09 82 00 09 86 00 0A 08
C0 00 00 00 09 C0 00 09 FF 00 09 AD 00 09 C1 00 09 B1 00 09 83 00 09 8B 00 0A 01
C0 00 00 FF F3 04 FF F3 44 FF F2 F0 FF F2 FE FF F2 F4 FF F2 F2 CA FF F2 CB FF F3 42
C0 00 FF EE 7F FF EE BD FF EE 66 FF EE C0 00 FF EE 7E FF EE BC FF EE 65 FF