Other Parts Discussed in Thread: ADS1261, ADS1235
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:ADS1261EVM 主题中讨论的其他器件:ADS1261、 ADS1235
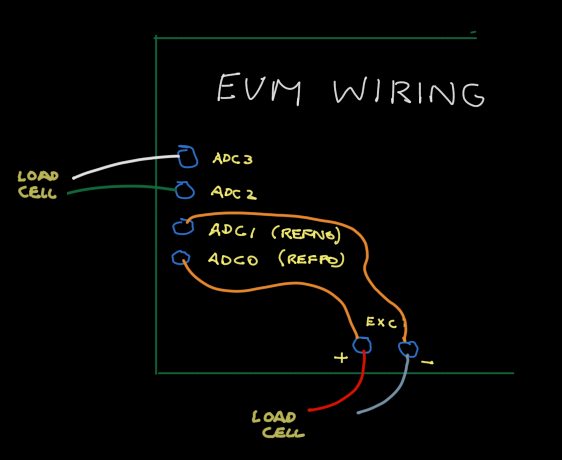
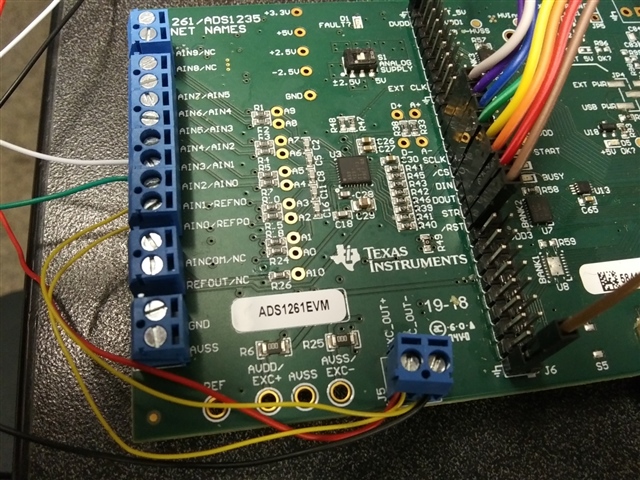
我使用具有单独 ESP32处理器的 EVM 来驱动电路板。
按照手册中的说明、我将 JP1置于三态。
一切都很好 几乎。
我发送0x06命令、"ECHO"在 MISO 上返回0x07。
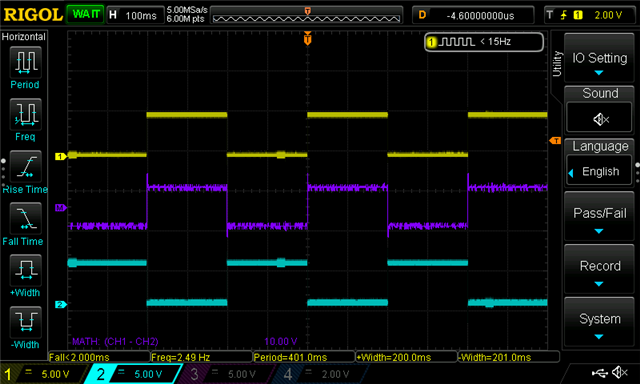
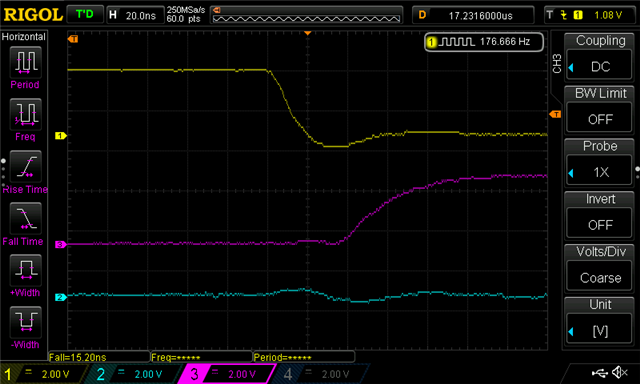
示波器轨迹显示了这一故事。
第一条轨迹是“概述”。 发送0x06并接收(应该是)返回0x06。
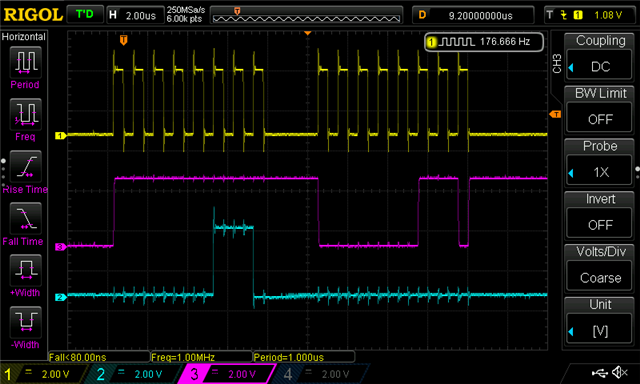
第二条迹线是最后一位的特写。 显示 ESP 仅需40ns 即可到达零。 它会得到1、这就是我返回0x07的原因。
ADS1261只允许在最后一位上40ns、而不是"正常"半时钟。
这对于 ESP32来说似乎太快。
我有什么问题吗?
时钟为1MHz;MSB 在前;mode1
示波器图像上的跟踪顺序是、
时钟(黄色)、MISO (紫色)、MOSI (蓝色)。
谢谢、Tom