Other Parts Discussed in Thread: ADS1256
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:ADS1256 我注意到从通道中提取差分数据时会发生溢出。
这里是输出:其中0是通道0、1通道1是1、2、以此类推。
通道0:1.718778v
通道 1:0.068488v <--它来自哪里?
通道 2: 000106v
通道 3:0.000100v
唯一连接了任何内容的通道是具有负载单元(4线制惠斯通)的通道0和1 (通过运算放大器运行)、其中通道0具有输出电压、通道1是运算放大器产生的 Vref
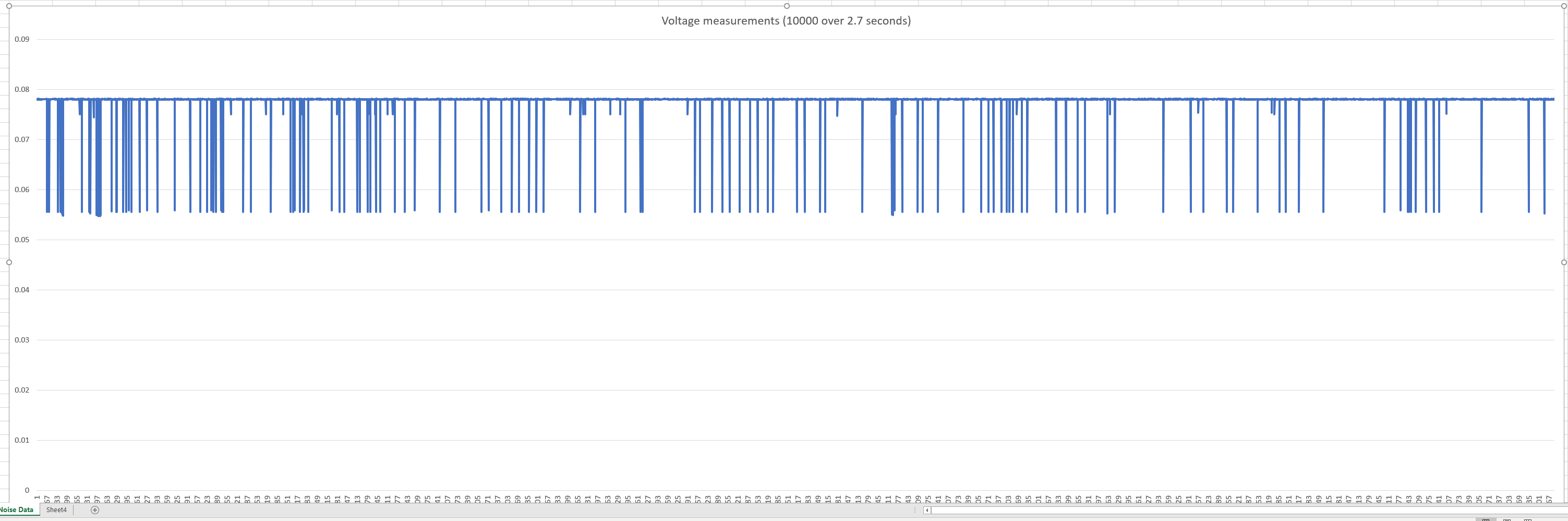
运算放大器和负载单元确实共享相同的5V+和 VCC。 采样率为30k (实际只有4000个样本/秒)、增益设置为4。
如果代码有价值、也很乐意分享代码。 我无法判断漏气是正时还是电气的、因为它在没有重量时会运行全部零(或非常接近于零)。