

Other Parts Discussed in Thread: ADS1131
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:ADS1131 我们正在使用 ADS1131设计体重秤 AD 转换。
有一个糟糕的特性、电路会不时为 SPI 总线提供极高的单个读数。
稳定读数可能会工作几分钟、但故障可能会在几秒钟内发生两次或更多。
由于不稳定更加明显,因此平均计算不起作用。
我们使用了干扰滤波器来进行非常高的转换、
但规模不会立即对重量的变化作出反应。
客户不接受我们的反应延迟,我们没有一个好的解决方案。
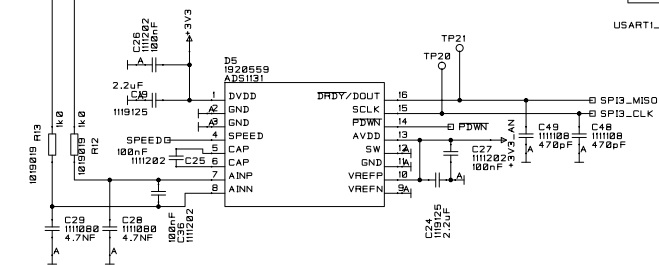
我们的速度为80SPS、PDWN 始终开启且未使用桥接开关。
SPI 时钟周期为32us。 时钟在检测就绪后150us 开始、MCU 为 cortex M3。
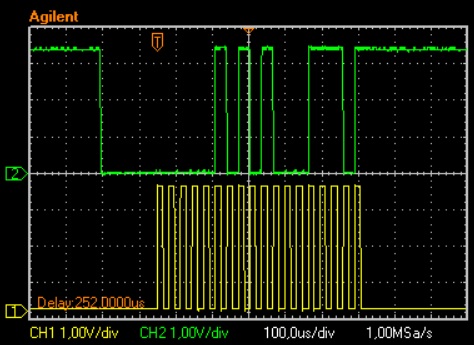
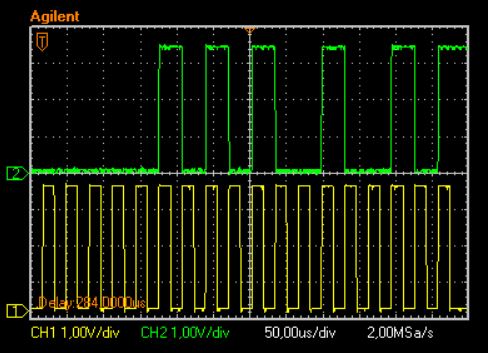
这些示波器图片只是正常的、只有几个最后的位变化了正常水平。
我还没有成功地将真正的错误纳入范围。
巴西(BR):
Timo Toivola

