Other Parts Discussed in Thread: AMC131M03, AMC131M01
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:AMC131M01 主题中讨论的其他器件:AMC131M03、
工具与软件:
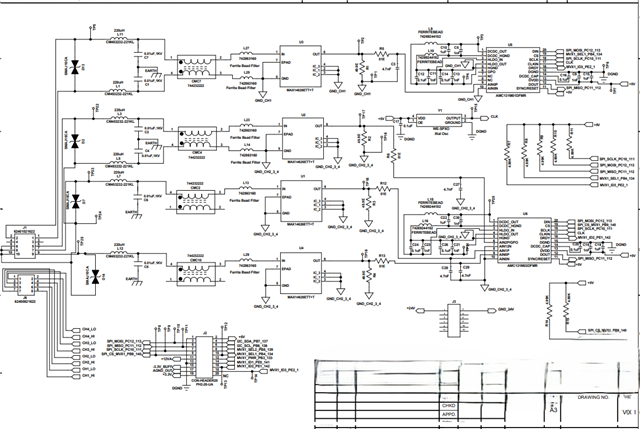
我正在使用 STM 微控制器来使用 SPI 来控制 AMC131M01DFMR。 我启用了直流/直流位、将 CIN 频率和分频器设置为默认值。 上电后、CIN 会提供连续时钟。 之后、发送 WRITE REGISTER (写入寄存器)和 READ REGISTER (读取寄存器)命令进行配置、仅启用直流/直流位、同时将所有其他命令保留为默认值。 但直流/直流输出端没有得到任何电压。 出现此问题的可能原因是什么?