主题中讨论的其他器件:DLP2000
大家好、 我正在尝试 在 Raspberry PI OS bookworm lite 中使用 dtoverage vc4-kms-dpi-generic 配置投影仪套件。 我在找到合适的参数时遇到问题。 我正在使用分辨率为640x360的投影仪、rgb666格式。 它与 dtoverlay dpi18非常配合。 我使用的是定制 PCB 板、因此通信不是问题。
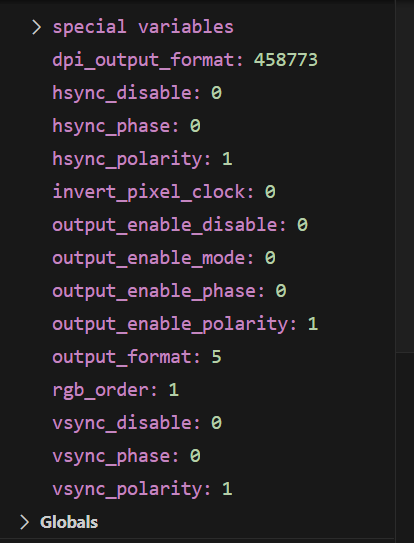
dpi 通用使用 rgb666作为默认值,我将 hdmi_timing 和 dpi_output_format 的配置从 dpi18转换为新的覆盖格式(水平前沿, HSYNC 等),所以 config.txt 现在有 dpi18注释掉,并在 vc4-kms-v3d 覆盖后有一个新条目:
*********
[...]
#dtoverallay=dpi18
#OVERSCAN_LEFT=0
#OVERSCAN_RIGHT=0
#OVERSCAN_TOP=0
#OVERSCAN_BORT=0
#framebuffer_width=640
#framebuffer_height=360
#enable_dpi_lcd=1
#display_default_lcd=0
#dpi_group=2
#dpi_mode=87
#dpi_output_format=458773
#hdmi_timers=640 0 14 4 12 360 0 2 3 9 0 0 60 0 1383000 3
dt覆盖=vc4-kms-v3d
max_framebuffers=2
dtoveray=vc4-kms-dpi-generic, clock-frequency=138100000
Dtparam=hactive = 640、HFP=14、HSYNC=4、HBP=12
dtparam=vactive=360、vfp=2、vsync=3、vbp=9
这家酒店还可以,但似乎是最差的
#dtparam=HSYNC-inverter=1、vsync-inverter=1
#dtparam=de-inverter=1、pixclk-inverter=0
香港特别行政区政府
有了这些参数,我得到了一个图像,但它有一些水平偏斜,这可以根据当前的内容工作:,
 |
 |
 |
这有问题。 我无法在不完全混乱图像的情况下对极性 HSYNC-INverter、VSYNC-INvert 和去反转使用正确的参数。 是否有人成功配置了覆层覆盆子 PI? 或者更好的是,创建了一个新的覆盖层,并与 vc4 kms 合并?
*注意,我无法返回到 dpi18并评论 vc4-kms-v3d。 它会阻止 libcamera 工作。