请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:BOOSTXL-CANFD-LIN 主题中讨论的其他器件:CC1310、 TCAN4550
工具与软件:
您好、TI:
我正在使 TCAN4550能够在低于1 CC1310微控制器上正常工作、但无法初始化 CAN。 我相信 SPI 设置正确、具有以下设置:
spiParams.frameFormat = SPI_POL0_PHA0;
spiParams.bitrate = 8000000;
spiParams.mode = SPI_MASTER;
spiParams.transferMode = SPI_MODE_BLOCKING;
我正在使用 TCAN4550演示软件、以便初始化 TCAN 芯片、但我无法写入 TCAN 芯片。 在读取错误状态寄存器(0x000C)期间、它读取以下内容:
0x18 0x00 0x00 0x0C、这意味着存在写入错误和内部中断错误。
我无法通过查看产品说明书来解决此问题、是否可以采取任何步骤来调试过程?
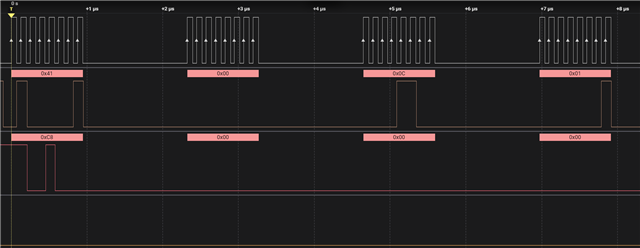

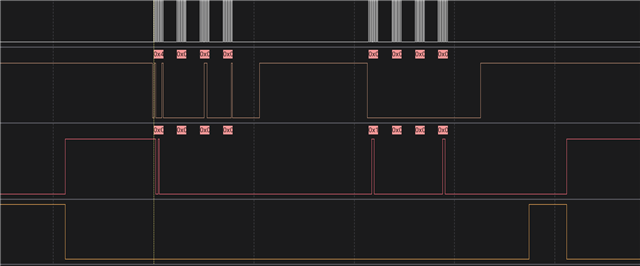
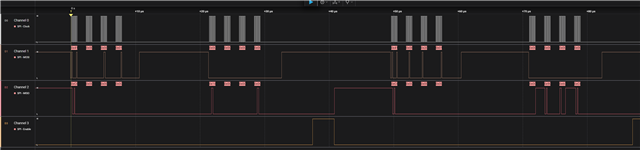
这是 SPI 通信的快照。

任何帮助都很好。
此致