请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TCAN1044A-Q1工具/软件:
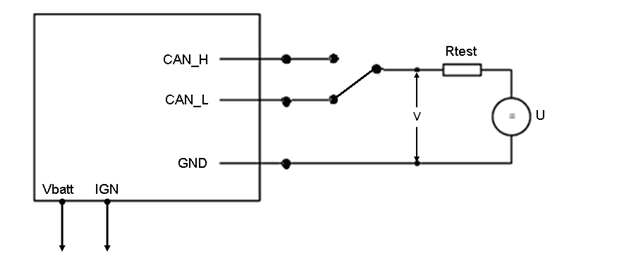
我们尝试测量 TCAN1044AVDRBRQ1 IC 的内部电阻。 虽然我们获得了 CAN 高电平的准确结果、但我们遇到了 CAN 低电平问题。 使用以下程序进行测试:
步骤:
- 使用欧姆计测量 Rtest 的精确值。
- 连接示波器以观察 Rin_CAN_H 的 CAN_H 和 GND 之间以及 Rin_CAN_L 的 CAN_L 和 GND 之间的电压(“V")“)
- 在电源电压 Vbatt 为 13.8 V 时给 ECU 通电
- 将 U(另一个电源)设置为 5 V
- 在隐性电平下测量“V"。“。
- 使用以下公式计算 Rin:
- RIN_CAN_L = Rtest *(VCAN_L - V)/(V - U)
- RIN_CAN_H = Rtest *(VCAN_H - V)/(V - U)
VCAN_H 和 VCAN_L 分别是电源电压为 13.8V 时在隐性状态期间 CAN_H 和 CAN_L 线的输出电压
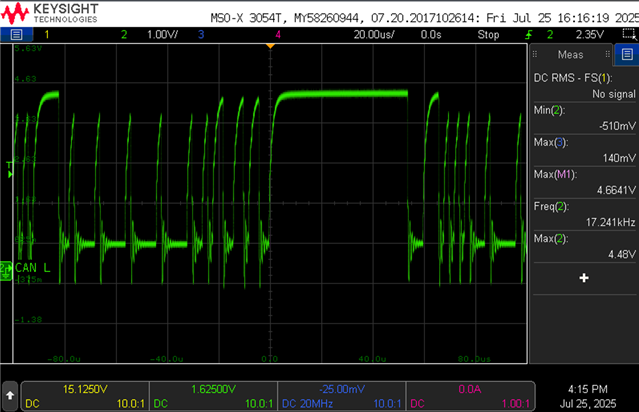
我们观察到线路上的 CAN 通信。
请告知原因。