Other Parts Discussed in Thread: TCAN4550, TCAN4551-Q1
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
https://e2e.ti.com/support/interface-group/interface/f/interface-forum/1579156/tcan4551-q1-spi-speed
器件型号: TCAN4551-Q1
主题中讨论的其他器件: TCAN4550、
尊敬的专家:
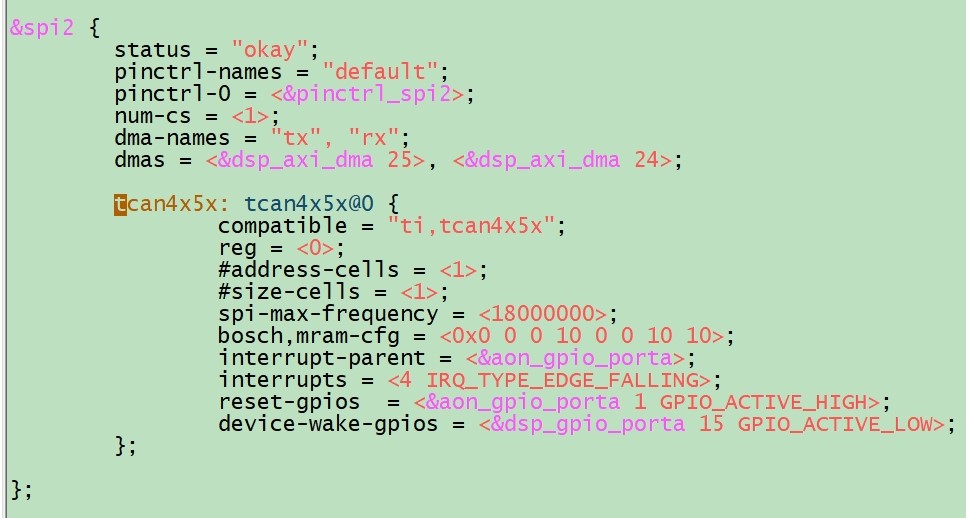
客户将遇到“写入:无缓冲区空间可用“错误、此时 Linux 和 PC 每 100ms 通过 TCAN4551 交换一次消息。 以下是客户 X5M Linux 平台 DTS 配置。 SPI 速度为 18MHz。 有什么问题吗?