请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
部件号:TCAN4550 “线程: 测试”中讨论的其它部件
你好
我是 Sanskar Verma, 我在使用 TCAN4550为 CAN-FD 开发产品时遇到了问题。
我能够以1000毫秒的延迟传输和接收数据,但如果将延迟降至100毫秒或以下,则所有数据包都无法到达接收器。 传输延迟小于100毫秒时,数据会严重丢失。
如果 CAN_Transmit 延迟1000毫秒或更长时间,我可以接收所有数据。但我的应用程序不需要延迟传输。 我想不断地传输和接收来自多个节点的数据。
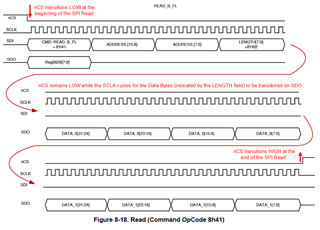
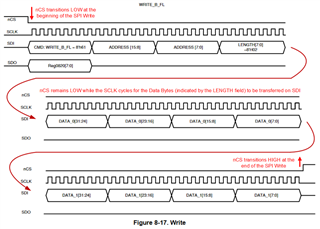
我正在附加 SPI 通信的所有4个波形以及寄存器0x000c,0x820,0x0824,0x0830的值供您参考。 如果您想从我身边获得更多信息,请查看并告诉我。
 NCS
NCS
CLK
 味噌
味噌
 莫西
莫西
寄存器的值
0x000C = 30000a / 20000a / 8 / 804000e (这些值保持随机波动)
0x820 = 88 / 8a (这些值大部分显示)
0x824 = 10105
0x830 = 809628 ff
0x0800 = c84004a0