请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
部件号:TCAN4550 “线程: 测试”中讨论的其它部件
大家好,团队
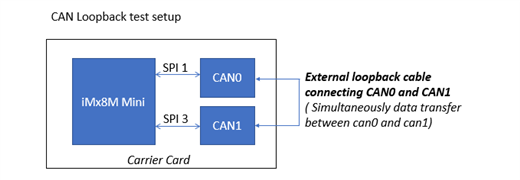
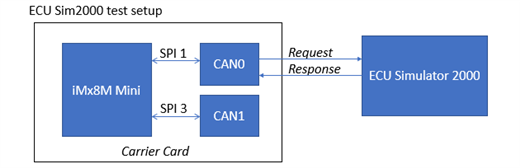
当我使用 tcan4x5x 驱动程序时,我正在连续执行发送 cansend 数据。 发送数据时,ifconfig 中 RX 字节的值将相应地递增。 在一定程度上,RX 数据包增量停止,并且无法接收和发送更多数据。 目前,驱动程序没有发出错误信息。
$ ifconfig
CAN0 链路接口:UNSPEC HWaddr 00-00-00-00-00-00-00-00-00-00-00-00-00-00-00-00-00-00
正在运行 NOARP MTU:16 公制:1.
Rx 数据包:65212错误:0丢弃:0溢出:0帧:0
Tx 数据包:65213错误:0丢弃:2溢出:0载波:2
冲突:0 txqueuelen:10.
Rx 字节:521696 (509.4 KiB) TX 字节:521704 (509.4 KiB)
中断:72
当我运行“ifconfig CAN0 down”并发送 cansend (CAN 初始化后)命令时,RX 数据包开始递增,并在一定时间后停止。
请帮我解决这个问题。
此致,
艾沙特