Other Parts Discussed in Thread: TCAN1145-Q1, USB2ANY
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
部件号:TCAN1145EVM 线程中讨论的其他部件:TMS320F28.0025万C, TCAN1145-Q1, USB2ANY
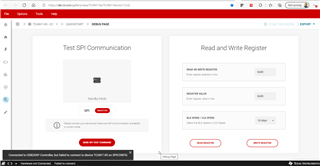
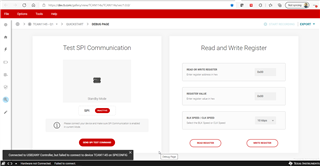
我们将TCAN1145-Q1与TI DSP TMS320F28.0025万C一起使用。 我们希望示例代码相同。 从哪里可以获得使用SPI配置TCAN IC的示例代码?