请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
部件号:TCAN4550 尊敬的团队:
我们在基于i.MX8M微型处理器的硬件中使用TCAN4550模块,内核5.4 .70的tcan4x5x驱动程序已修改。 我们设置了以下配置,
SPI频率:18MHz
晶体时钟频率:40MHz
传输CAN数据的比特率:500kbps
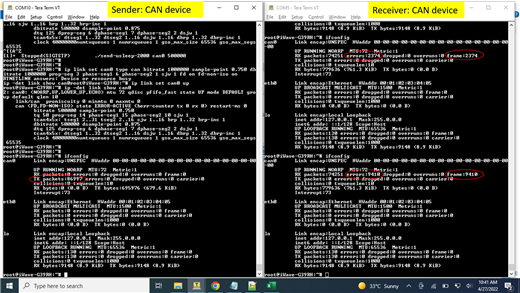
目前,我们可以使用模拟器以500 Kbps的速度接收每秒150帧。 超过160帧/秒后,我们会注意到candump应用程序挂起。 帧有8个字节的数据,而有效负载共有16个字节的帧。
我们需要测试我们的硬件,以便每秒从CAN模拟器接收1500个数据帧。 CAN模拟器每秒发送1500个数据帧。 如何增加CAN数据帧的接收?
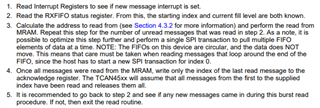
我是否需要在DTS文件的MRAM配置中增加RX FIFO 0和RX FIFO 1值?
DTS文件中的当前tcan4x5x配置如下所示。
&ecspi3 {
fsl,spi-num-chipselects = <1>;
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_ecspi3>;
cs-gpios = <&gpio5 25 GPIO_ACTIVE_LOW>;
status = "okay";
tcan4x5x1: tcan4x5x@0 {
compatible = "ti,tcan4x5x";
reg = <0>;
pinctrl-names = "default";
#address-cells = <1>;
#size-cells = <1>;
interrupt-parent = <&gpio1>;
interrupts = <15 IRQ_TYPE_LEVEL_LOW>;
spi-max-frequency = <18000000>;
bosch,mram-cfg = <0x0 3 2 32 10 1 32 7>;
clocks = <&hclk>, <&cclk>;
clock-names = "hclk", "cclk";
data-ready-gpios = <&gpio1 15 GPIO_ACTIVE_HIGH>;
reset-gpios = <&gpio3 20 GPIO_ACTIVE_HIGH>;
status = "okay";
};
};
此致,
Aysha T