请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:DS90UB953-Q1 主题中讨论的其他器件:ALP
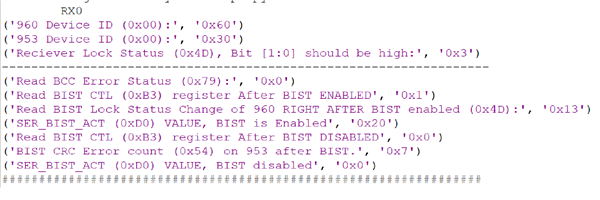
您好!
我们的系统有两个 ub960、每个都有四个 ub953连接到它。 每个 ub953都连接到摄像头。 整个系统工作正常、我们能够从摄像头流式传输图像。 我正在尝试编写一个程序、通过使用 BIST 功能来评估 ub960和 ub953之间的链路质量。 但是、当我将 ub960上的 BIST 控制寄存器(0xB3)设置为0x1时、任何连接的 ub953都不会进入 BIST 模式。 检查 ub960上每个 RX 端口的 PORT_DEBUG 寄存器(0xD0)中的 SER_BIST_ACT 位即可确认这一点。 我还检查 ub953上的 REMOAL_PAR_CAP1寄存器(0x35)、BIST_EN 位为0。 在 ub960上启用 ub953后、是否有任何原因使其无法进入 BIST 模式? 此外、由于寄存器0xB3不是特定于 RX 端口、它是否会在所有连接的 ub953上启用 BIST? 谢谢