Other Parts Discussed in Thread: TCAN4550
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TCAN4550 您好!
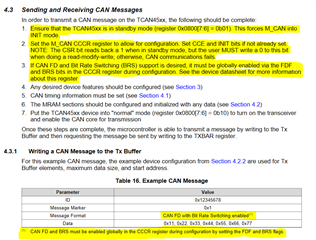
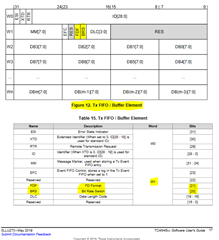
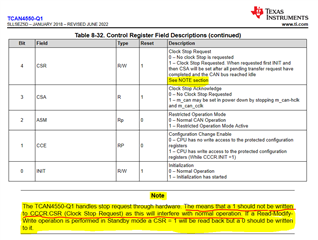
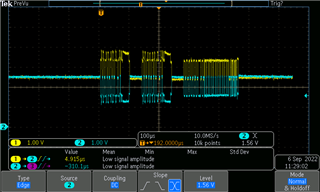
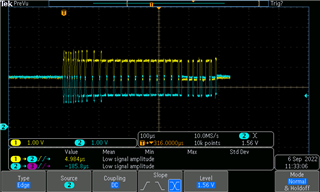
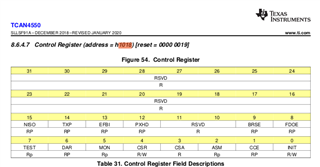
我正在测试 CANFD。 以常规速度发送64个数据字节会阻塞 CAN 总线。 我想通过写入寄存器 h1018的第9位来开启位速率切换。 但第9位是读写保护类型。 因此、我无法将该位写入高电平以启用传输启用的比特率切换。 这是什么解决方案?
下面是相同的快照。
此致、
Akshay