主题中讨论的其他器件:TCAN4550、 MSP430FR6989、 BOOSTXL-CANFD-LIN
你(们)好
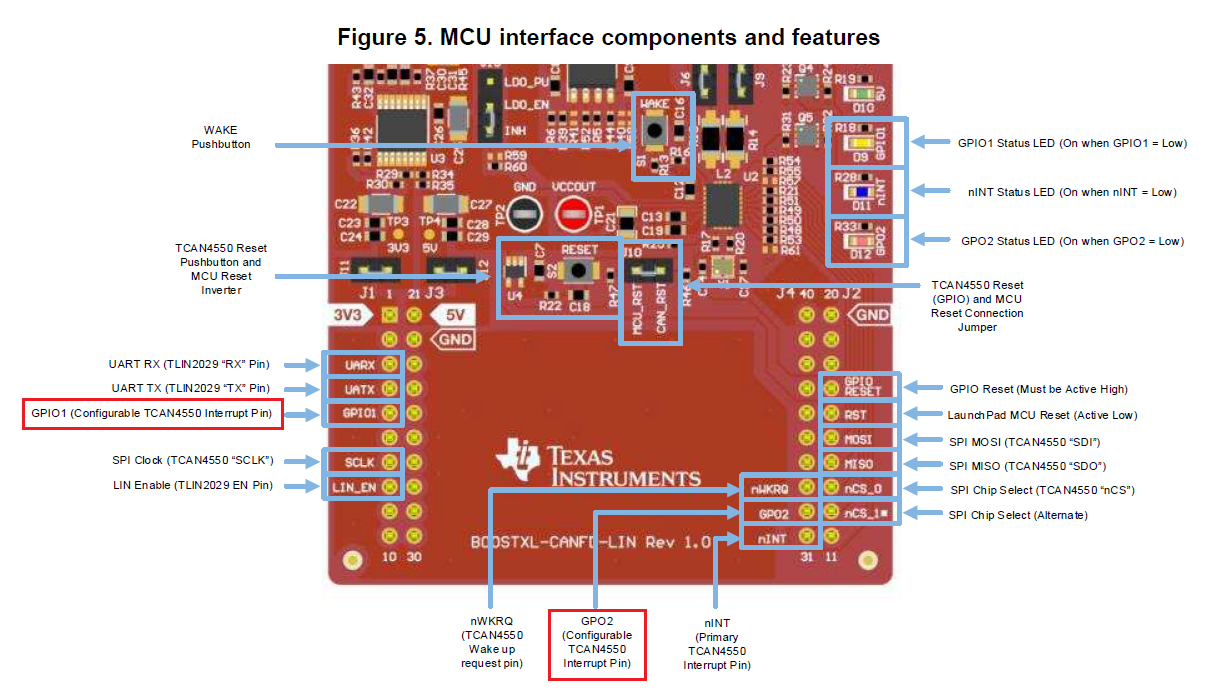
我想将 TCAN4550配置为控制器模式、通过 SPI 接口发送 CAN 帧、然后检查 GPO2上的输出。 您能告诉我如何配置硬件连接和软件配置来实现这一点吗?

我有一个 MSP430FR6989 Launchpad 和 TCAN4550EVM、选择 MSP430FR6989作为 MCU 板的原因是我在 TCAN4550驱动器代码中找到了该器件型号。

我做了一些工作:
用于硬件连接
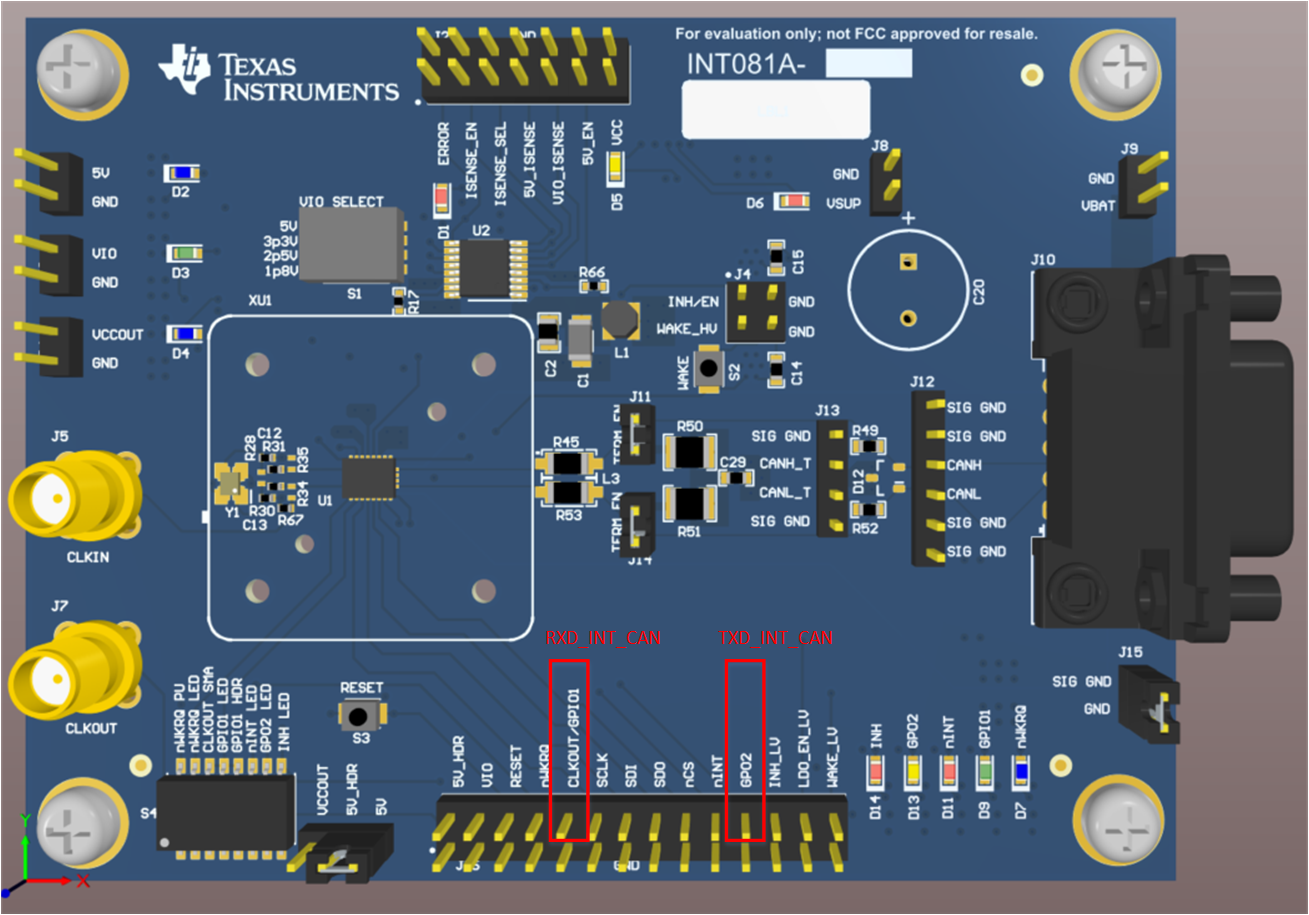
TCAN4550EVM
- TCAN4550EVM 由 TCAN4550EVM 上的直流电源通过 J8 (->VSUP)供电。
- VIO 选择(S1)为3.3V 输出。
MSP430FR6989 LaunchPad
- P1.4 -> SPI CLK
- P1.6 -> MOSI
- P1.7 -> MISO
- P2.5 -> SPI CS
用于软件配置
- TCAN455x 驱动程序库演示 是来自 TCAN4550产品文件夹页面的参考代码。
-
我在 Init_can ()之后添加了 TCAN4x5x_Device_EnableTestMode (TCAN4x5x_DEVICE_TEST_MODE_CONTROLLER)以尝试使 TCAN4550进入控制器模式
(笑声) (笑声) (笑声) (笑声)
/*********
*目前一切都适用于 TCAN4550 *
(小部分 /
init_cand();//运行主 MCAN 配置序列。 大部分配置都在这里!TCAN4x5x_Device_EnableTestMode (TCAN4x5x_device_test_mode_controller);
/*定义我们要发送的 CAN 消息*/
TCAN4x5x_MCAN_TX_Header 接头={0};(笑声) (笑声) (笑声) (笑声)
-
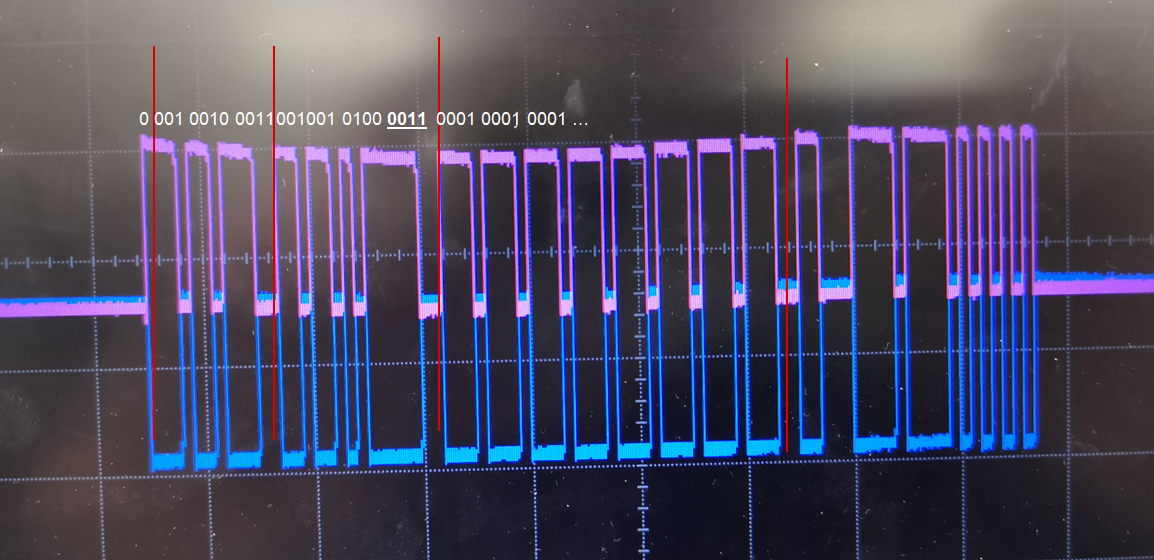
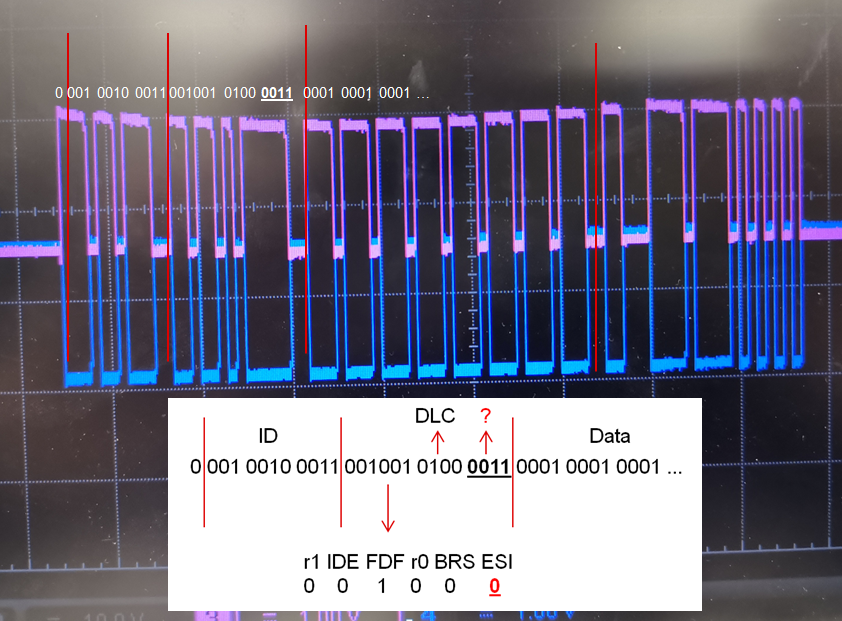
以使用以下代码检测 GPO2上的输出。
TCAN4x5x_MCAN_TransmitBufferContents (1);//请求发送 TX 缓冲区1
TCAN4x5x_MCAN_TransmitBufferContents (0);//现在我们可以发送我们之前排队但未发送的 TX FIFO 元素0数据。
您能告诉我我还需要做些什么来实现我的目标吗?
谢谢你。
王少文
shawn-wang@ti.com